I am excited to share that our paper XTrace: Making the most of every sample in stochastic trace estimation has been published in the SIAM Journal on Matrix Analysis and Applications. (See also our paper on arXiv.)
Spurred by this exciting news, I wanted to take the opportunity to share one of my favorite results in randomized numerical linear algebra: a “speed limit” result of Meyer, Musco, Musco, and Woodruff that establishes a fundamental limitation on how accurate any trace estimation algorithm can be.
Let’s back up. Given an unknown square matrix  , the trace of , defined to be the sum of its diagonal entries
, the trace of , defined to be the sum of its diagonal entries
![\[\tr(A) \coloneqq \sum_{i=1}^n A_{ii}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-80cd9a9ca29d1d3bb13ce28fd80b5e59_l3.png "Rendered by QuickLaTeX.com")
through matrix–vector products (affectionately known as “matvecs”): Given any vector  , we have access to
, we have access to  . Our goal is to form an estimate
. Our goal is to form an estimate  that is as accurate as possible while using as few matvecs as we can get away with.
that is as accurate as possible while using as few matvecs as we can get away with.
To simplify things, let’s assume the matrix is symmetric and positive (semi)definite. The classical algorithm for trace estimation is due to Girard and Hutchinson, producing a probabilistic estimate with a small average (relative) error:
![\[\expect\left[\frac{|\hat{\tr}-\tr(A)|}{\tr(A)}\right] \le \varepsilon \quad \text{using } m= \frac{\rm const}{\varepsilon^2} \text{ matvecs}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-07898a8a2214416cb97b8b72956e3e76_l3.png "Rendered by QuickLaTeX.com")
 ) requires roughly
) requires roughly  matvecs!
matvecs!
This state of affairs was greatly improved by Meyer, Musco, Musco, and Woodruff. Building upon previous work, they proposed the Hutch++ algorithm and proved it outputs an estimate satisfying the following bound:
(1) ![\[\expect\left[\frac{|\hat{\tr}-\tr(A)|}{\tr(A)}\right] \le \varepsilon \quad \text{using } m= \frac{\rm const}{\varepsilon} \text{ matvecs}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b9f186640222c78e5064f83465038b78_l3.png "Rendered by QuickLaTeX.com")
 matvecs to achieve 1% error! Our algorithm, XTrace, satisfies the same error guarantee (1) as Hutch++. On certain problems, XTrace can be quite a bit more accurate than Hutch++.
matvecs to achieve 1% error! Our algorithm, XTrace, satisfies the same error guarantee (1) as Hutch++. On certain problems, XTrace can be quite a bit more accurate than Hutch++.
The MMMW Trace Estimation “Speed Limit”
Given the dramatic improvement of Hutch++ and XTrace over Girard–Hutchinson, it is natural to hope: Is there an algorithm that does even better than Hutch++ and XTrace? For instance, is there an algorithm satisfying an even slightly better error bound of the form
![\[\expect\left[\frac{|\hat{\tr}-\tr(A)|}{\tr(A)}\right] \le \varepsilon \quad \text{using } m= \frac{\rm const}{\varepsilon^{0.999}} \text{ matvecs}?\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8bae682300a401dc80869764b302ce8c_l3.png "Rendered by QuickLaTeX.com")
Let’s add some fine print. Consider an algorithm for the trace estimation problem. Whenever the algorithm wants, it can present a vector  and receive back
and receive back  . The algorithm is allowed to be adaptive: It can use the matvecs
. The algorithm is allowed to be adaptive: It can use the matvecs  it has already collected to decide which vector
it has already collected to decide which vector  to present next. We measure the cost of the algorithm in terms of the number of matvecs alone, and the algorithm knows nothing about the psd matrix other what it learns from matvecs.
to present next. We measure the cost of the algorithm in terms of the number of matvecs alone, and the algorithm knows nothing about the psd matrix other what it learns from matvecs.
One final stipulation:
Simple entries assumption. We assume that the entries of the vectors
and
with up to
digits after the decimal place.
To get a feel for this simple entries assumption, suppose we set  . Then
. Then  would be an allowed input vector, but
would be an allowed input vector, but  would not be (too many digits after the decimal place). Similarly,
would not be (too many digits after the decimal place). Similarly,  would not be valid because its entries exceed . The simple entries assumption is reasonable as we typically represent numbers on digital computers by storing a fixed number of digits of accuracy.1We typically represent numbers on digital computers by floating point numbers, which essentially represent numbers using scientific notation like
would not be valid because its entries exceed . The simple entries assumption is reasonable as we typically represent numbers on digital computers by storing a fixed number of digits of accuracy.1We typically represent numbers on digital computers by floating point numbers, which essentially represent numbers using scientific notation like  . For this analysis of trace estimation, we use fixed point numbers like
. For this analysis of trace estimation, we use fixed point numbers like  (no powers of ten allowed)!
(no powers of ten allowed)!
With all these stipulations, we are ready to state the “speed limit” for trace estimation proved by Meyer, Musco, Musco, and Woodruff:
Informal theorem (Meyer, Musco, Musco, Woodruff). Under the assumptions above, there is no trace estimation algorithm producing an estimate
![\[\expect\left[\frac{|\hat{\tr}-\tr(A)|}{\tr(A)}\right] \le \varepsilon \quad \text{using } m= \frac{\rm const}{\varepsilon^{0.999}} \text{ matvecs}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-9034edba9bafb68809d24d54f5a830e6_l3.png "Rendered by QuickLaTeX.com")
We will see a slightly sharper version of the theorem below, but this statement captures the essence of the result.
Communication Complexity
To prove the MMMW theorem, we have to take a journey to the beautiful subject of communication complexity. The story is this. Alice and Bob are interested in solving a computational problem together. Alice has her input and Bob has his input  , and they are interested in computing a function
, and they are interested in computing a function  of both their inputs.
of both their inputs.
Unfortunately for the two of them, Alice and Bob are separated by a great distance, and can only communicate by sending single bits (0 or 1) of information over a slow network connection. Every bit of communication is costly. The field of communication complexity is dedicated to determining how efficiently Alice and Bob are able to solve problems of this form.
The Gap-Hamming problem is one example of a problem studied in communication complexity. As inputs, Alice and Bob receive vectors  with
with  and entries from a third party Eve. Eve promises Alice and Bob that their vectors and satisfy one of two conditions:
and entries from a third party Eve. Eve promises Alice and Bob that their vectors and satisfy one of two conditions:
(2) ![\[\text{Case 0: } x^\top y \ge\sqrt{n} \quad \text{or} \quad \text{Case 1: } x^\top y \le -\sqrt{n}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3134941eeedf133f83ba4795b499332f_l3.png "Rendered by QuickLaTeX.com")
There’s one simple solution to this problem: First, Bob sends his whole input vector to Alice. Each entry of takes one of the two value  and can therefore be communicated in a single bit. Having received , Alice computes
and can therefore be communicated in a single bit. Having received , Alice computes  , determines whether they are in case 0 or case 1, and sends Bob a single bit to communicate the answer. This procedure requires
, determines whether they are in case 0 or case 1, and sends Bob a single bit to communicate the answer. This procedure requires  bits of communication.
bits of communication.
Can Alice and Bob still solve this problem with many fewer than  bits of communication, say
bits of communication, say  bits? Unfortunately not. The following theorem of Chakrabati and Regev shows that roughly bits of communication are needed to solve this problem:
bits? Unfortunately not. The following theorem of Chakrabati and Regev shows that roughly bits of communication are needed to solve this problem:
Theorem (Chakrabati–Regev). Any algorithm which solves the Gap-Hamming problem that succeeds with at least
probability for every pair of inputs
bits of communication.
Here, is big-Omega notation, closely related to big-O notation  and big-Theta notation
and big-Theta notation  . For the less familiar, it can be helpful to interpret , , and as all standing for “proportional to ”. In plain language, the theorem of Chakrabati and Regev result states that there is no algorithm for the Gap-Hamming problem that much more effective than the basic algorithm where Bob sends his whole input to Alice (in the sense of requiring less than bits of communication).
. For the less familiar, it can be helpful to interpret , , and as all standing for “proportional to ”. In plain language, the theorem of Chakrabati and Regev result states that there is no algorithm for the Gap-Hamming problem that much more effective than the basic algorithm where Bob sends his whole input to Alice (in the sense of requiring less than bits of communication).
Reducing Gap-Hamming to Trace Estimation
This whole state of affairs is very sad for Alice and Bob, but what does it have to do with trace estimation? Remarkably, we can use hardness of the Gap-Hamming problem to show there’s no algorithm that fundamentally improves on Hutch++ and XTrace. The argument goes something like this:
- If there were a trace estimation algorithm fundamentally better than Hutch++ and XTrace, we could use it to solve Gap-Hamming in fewer than bits of communication.
- But no algorithm can solve Gap-Hamming in fewer than bits or communication.
- Therefore, no trace estimation algorithm is fundamentally better than Hutch++ and XTrace.
Step 2 is the work of Chakrabati and Regev, and step 3 follows logically from 1 and 2. Therefore, we are left to complete step 1 of the argument.
Protocol
Assume we have access to a really good trace estimation algorithm. We will use it to solve the Gap-Hamming problem. For simplicity, assume is a perfect square. The basic idea is this:
- Have Alice and Bob reshape their inputs into matrices
 , and consider (but do not form!) the positive semidefinite matrix
, and consider (but do not form!) the positive semidefinite matrix ![\[A = (X+Y)^\top (X+Y).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-2b1df104e3d571430963573b54d5c4df_l3.png "Rendered by QuickLaTeX.com")
- Observe that
Thus, the two cases in (2) can be equivalently written in terms of![\[\tr(A) = \tr(X^\top X) + 2\tr(X^\top Y) + \tr(Y^\top Y) = 2n + 2(x^\top y).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a0f6e916740a9c27733c659418cc15cf_l3.png "Rendered by QuickLaTeX.com")
 :
:(2′)
![\[\text{Case 0: } \tr(A)\ge 2n + 2\sqrt{n} \quad \text{or} \quad \text{Case 1: } \tr(A) \le 2n-2\sqrt{n}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1fea970636b48c827e4584d3655b9e3c_l3.png "Rendered by QuickLaTeX.com")
- By working together, Alice and Bob can implement a trace estimation algorithm. Alice will be in charge of running the algorithm, but Alice and Bob must work together to compute matvecs. (Details below!)
- Using the output of the trace estimation algorithm, Alice determines whether they are in case 0 or 1 (i.e., where
 or
or  ) and sends the result to Bob.
) and sends the result to Bob.
To complete this procedure, we just need to show how Alice and Bob can implement the matvec procedure using minimal communication. Suppose Alice and Bob want to compute  for some vector
for some vector  with entries between and with up to decimal digits. First, convert to a vector
with entries between and with up to decimal digits. First, convert to a vector  whose entries are integers between
whose entries are integers between  and
and  . Since
. Since  , interconverting between and
, interconverting between and  is trivial. Alice and Bob’s procedure for computing is as follows:
is trivial. Alice and Bob’s procedure for computing is as follows:
- Alice sends Bob
 .
. - Having received , Bob forms
 and sends it to Alice.
and sends it to Alice. - Having received , Alice computes
 and sends it to Bob.
and sends it to Bob. - Having received
 , Bob computes
, Bob computes  and sends its to Alice.
and sends its to Alice. - Alice forms
 .
.
Because  and
and  are
are  and have entries, all vectors computed in this procedure are vectors of length with integer entries between
and have entries, all vectors computed in this procedure are vectors of length with integer entries between  and
and  . We conclude the communication cost for one matvec is
. We conclude the communication cost for one matvec is  bits.
bits.
Analysis
Consider an algorithm we’ll call BestTraceAlgorithm. Given any accuracy parameter  , BestTraceAlgorithm requires at most
, BestTraceAlgorithm requires at most  matvecs and, for any positive semidefinite input matrix of any size, produces an estimate satisfying
matvecs and, for any positive semidefinite input matrix of any size, produces an estimate satisfying
(3) ![\[\expect\left[\frac{|\hat{\tr}-\tr(A)|}{\tr(A)}\right] \le \varepsilon.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a9165ea3846d540eb654af9f7f59a5c2_l3.png "Rendered by QuickLaTeX.com")
 matvecs.
matvecs.
To solve the Gap-Hamming problem, Alice and Bob just need enough accuracy in their trace estimation to distinguish between cases 0 and 1. In particular, if
![\[\left| \frac{\hat{\tr} - \tr(A)}{\tr(A)} \right| \le \frac{1}{\sqrt{n}},\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8327e1b03c9ba9162fb737e40a192b3a_l3.png "Rendered by QuickLaTeX.com")
Suppose that Alice and Bob apply trace estimation to solve the Gap-Hamming problem, using  matvecs in total. The total communication is
matvecs in total. The total communication is  bits. Chakrabati and Regev showed that Gap-Hamming requires
bits. Chakrabati and Regev showed that Gap-Hamming requires  bits of communication (for some
bits of communication (for some  ) to solve the Gap-Hamming problem with probability. Thus, if
) to solve the Gap-Hamming problem with probability. Thus, if  , then Alice and Bob fail to solve the Gap-Hamming problem with at least
, then Alice and Bob fail to solve the Gap-Hamming problem with at least  probability. Thus,
probability. Thus,
![\[\text{If } m < \frac{cn}{T} = \Theta\left( \frac{\sqrt{n}}{b+\log n} \right), \quad \text{then } \left| \frac{\hat{\tr} - \tr(A)}{\tr(A)} \right| > \frac{1}{\sqrt{n}} \text{ with probability at least } \frac{1}{3}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-74364fd915239fdaf0889d005378b7ba_l3.png "Rendered by QuickLaTeX.com")
![\[\text{If }\left| \frac{\hat{\tr} - \tr(A)}{\tr(A)} \right| \le \frac{1}{\sqrt{n}}\text{ with probability at least } \frac{2}{3}, \quad \text{then } m \ge \Theta\left( \frac{\sqrt{n}}{b+\log n} \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-81fbd6e8e08c9759a6cbf5ac4f9782e2_l3.png "Rendered by QuickLaTeX.com")
Say Alice and Bob run BestTraceAlgorithm with parameter
 . Then, by (3) and Markov’s inequality,
. Then, by (3) and Markov’s inequality, ![\[\left| \frac{\hat{\tr} - \tr(A)}{\tr(A)} \right| \le \frac{1}{\sqrt{n}} \quad \text{with probability at least }\frac{2}{3}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-95db791999f5573659f14f5b0d4a386e_l3.png "Rendered by QuickLaTeX.com")
![\[m \ge \Theta\left( \frac{\sqrt{n}}{b+\log n} \right) \text{ matvecs}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8f0975698051029d6273269409146a9f_l3.png "Rendered by QuickLaTeX.com")
 , we conclude that any trace estimation algorithm, even BestTraceAlgorithm, requires
, we conclude that any trace estimation algorithm, even BestTraceAlgorithm, requires ![\[m \ge \Theta \left( \frac{1}{\varepsilon (b+\log(1/\varepsilon))} \right) \text{ matvecs}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b3eb651ca114a7fe19f3b8c5d3e64063_l3.png "Rendered by QuickLaTeX.com")
 using even
using even  matvecs. This proves the MMMW theorem.
matvecs. This proves the MMMW theorem.
 be a domain and let
be a domain and let  be a (
be a ( . We consider the task of evaluating
. We consider the task of evaluating ![\[I[f] = \int_\Omega f(x) g(x) \, \mathrm{d}\mu(x).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4767401252e7558c87b5a518f3609468_l3.png "Rendered by QuickLaTeX.com")
 ,
, ![I[f]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-603f22dedcf932b6f47e37160c09afd8_l3.png "Rendered by QuickLaTeX.com") for multiple different functions
for multiple different functions  .
.
![\[\hat{I}_{w,s}[f] = \sum_{i=1}^n w_i f(s_i) \approx I[f].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4bb6a83827b630719dd50338a790b9c6_l3.png "Rendered by QuickLaTeX.com")
 and points
and points  such that the approximation
such that the approximation ![\hat{I}_{w,s}[f] \approx I[f]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-61580a8cc2043483ce9c1ab09e3ea85e_l3.png "Rendered by QuickLaTeX.com") is accurate.
is accurate.
 be an RKHS with
be an RKHS with  . We can interpret the norm as assigning a roughness
. We can interpret the norm as assigning a roughness  to each function
to each function  . The kernel is a bivariate function
. The kernel is a bivariate function  . It is related to the RKHS
. It is related to the RKHS  by the reproducing property
by the reproducing property![\[f(x)=\langle f, k(x,\cdot)\rangle \quad \text{for every }f\in\mathcal{H},x\in\Omega.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-276db3513a1ea34da49f342ad7f4a7ea_l3.png "Rendered by QuickLaTeX.com")
 represents the univariate function obtained by setting the first input of
represents the univariate function obtained by setting the first input of  . Let’s first assume that the nodes
. Let’s first assume that the nodes  are fixed, and talk about how to pick the weights
are fixed, and talk about how to pick the weights  that we’ll called the ideal weights. There (at least) are five equivalent ways of characterizing the ideal weights. We’ll present all of them. As an exercise, you can try and convince yourself that these characterizations are equivalent, giving rise to the same weights.
that we’ll called the ideal weights. There (at least) are five equivalent ways of characterizing the ideal weights. We’ll present all of them. As an exercise, you can try and convince yourself that these characterizations are equivalent, giving rise to the same weights. .
.![\[\hat{I}_{w_\star,s}[k(s_i,\cdot)]=I[k(s_i,\cdot)] \quad \text{for } i=1,2,\ldots,n.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-52bf51e5f4ddb42195d5896ff71ebe02_l3.png "Rendered by QuickLaTeX.com")
 :
:![\[\sum_{j=1}^n k(s_i,s_j)w^\star_j = \int_\Omega k(s_i,x) g(x)\,\mathrm{d}\mu(x) \quad \text{for }i=1,2,\ldots,n.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1a5ca36966f56dae9d994e208f9ef036_l3.png "Rendered by QuickLaTeX.com")
 is the ideal weights.
is the ideal weights.
 at the nodes, obtaining an interpolant
at the nodes, obtaining an interpolant  . Then, obtain an approximation to the integral by integrating the interpolant:
. Then, obtain an approximation to the integral by integrating the interpolant:![\[\hat{I}_{w^\star,s}[f] \coloneqq \int_\Omega \hat{f}(x) g(x) \, \mathrm{d}\mu(x).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0c68060fdf085f41d9cbdd9cc5c16e31_l3.png "Rendered by QuickLaTeX.com")
![\[\hat{f} = \argmin \{ \norm{h} : h(s_i) = f(s_i) \text{ for } i=1,\ldots,n\}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5619a986180c554d2a079e5156a97571_l3.png "Rendered by QuickLaTeX.com")
![\[\hat{f} = \sum_{i=1}^n \alpha_i k(\cdot,s_i)\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0abcded0eda92deac99b904817afdf5b_l3.png "Rendered by QuickLaTeX.com")
 .With a little algebra, you can show that the integral of
.With a little algebra, you can show that the integral of ![\[I[\hat{f}] = \sum_{i=1}^n w^\star_i f(s_i),\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f0da23bc7dc97894b0a6702b6bf6ddfb_l3.png "Rendered by QuickLaTeX.com")
![\[\operatorname{Err}(w,s)=\sup_{\norm{f}\le 1}\left| I[f] - \hat{I}_{w,s}[f]\right|.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6e46307dc4cdac54a3ab010b36ed7858_l3.png "Rendered by QuickLaTeX.com")
 is the highest possible quadrature error for a function
is the highest possible quadrature error for a function  of norm at most 1.
of norm at most 1.
![\[w^\star=\operatorname*{argmin}_{w\in\real^n}\operatorname{Err}(w,s).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-06e68886b8279d9d592cae3775d4295f_l3.png "Rendered by QuickLaTeX.com")
 for a mean-zero Gaussian process with
for a mean-zero Gaussian process with ![\[\Cov(f(x),f(y))=k(x,y)\quad \text{for every } x,y\in\Omega.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-19fea8ea8406c891c0d6bab2166dc4a4_l3.png "Rendered by QuickLaTeX.com")
![\[\operatorname{MSE}(w,s)\coloneqq \expect_{f\sim\operatorname{GP}(0,k)} \left( I[f] - \hat{I}_{w,s}[f] \right)^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4741e0bcba7276b0a3a9266cd61b54c0_l3.png "Rendered by QuickLaTeX.com")
![\[\operatorname{MSE}(w,s)=\operatorname{Err}(w,s)^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-dc387f1211b9e5a070f2778a8205c022_l3.png "Rendered by QuickLaTeX.com")
![\[w^\star=\operatorname*{argmin}_{w\in\real^n}\operatorname{MSE}(w,s).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-32506adbc7176da52a920dbf4c373149_l3.png "Rendered by QuickLaTeX.com")
 . The integral of this random function
. The integral of this random function ![I[h]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e47eba0764d69669e85367cf245d71d3_l3.png "Rendered by QuickLaTeX.com") is a random variable. To numerically integrate a function
is a random variable. To numerically integrate a function  agreeing with
agreeing with ![\[\hat{I}_{w^\star,s}[f]\coloneqq \expect_{h\sim\operatorname{GP}(0,k)}[I[h] \mid h(s_i)=f(s_i) \text{ for } i=1,\ldots,n].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-ce1156fb9da612607ae0158770a34645_l3.png "Rendered by QuickLaTeX.com")
 , it is reasonable to add an additional constraint that the weights
, it is reasonable to add an additional constraint that the weights ![\[w\in\Delta\coloneqq \left\{ p\in\real^n_+ : \sum_{i=1}^n p_i = 1\right\}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-55c593b2593abc9ea8c18d4f8edbccd3_l3.png "Rendered by QuickLaTeX.com")
 ; thus, in effect, quadrature amounts to approximating one probability measure
; thus, in effect, quadrature amounts to approximating one probability measure  . Additional constraints such as these can easily be imposed when using the optimization characterizations 3 and 4 of the ideal weights. See
. Additional constraints such as these can easily be imposed when using the optimization characterizations 3 and 4 of the ideal weights. See  ? To pick the nodes, it seems sensible to try and minimize the worst-case error
? To pick the nodes, it seems sensible to try and minimize the worst-case error  with the ideal weights
with the ideal weights ![\[\operatorname{Err}(w^\star,s) = \norm{\int_\Omega (k(\cdot,x) - \hat{k}_s(\cdot,x)) g(x) \, \mathrm{d}\mu(x)}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f66a0cdfc8a943a944dad0fed98dbad9_l3.png "Rendered by QuickLaTeX.com")
 is the
is the ![\[\hat{k}_s(x,y) = k(x,s) k(s,s)^{-1} k(s,y).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-9c55d13be5a7cdb27139303cb08ec19f_l3.png "Rendered by QuickLaTeX.com")
 for the kernel matrix with
for the kernel matrix with  entry
entry  and
and  and
and  for the row and column vectors with
for the row and column vectors with  th entry
th entry  and
and  .
.
 as accurate as possible.
as accurate as possible. is and, thus, the smaller the error
is and, thus, the smaller the error  , it has a high probability of placing the next node
, it has a high probability of placing the next node  far from the previously selected nodes.
far from the previously selected nodes.
 seeks to compress a high-dimensional matrix
seeks to compress a high-dimensional matrix  or vector
or vector  to a lower-dimensional sketched matrix
to a lower-dimensional sketched matrix  or vector
or vector  . The quality of a sketching matrix for a matrix
. The quality of a sketching matrix for a matrix ![\[(1-\varepsilon) \norm{x} \le \norm{Sx} \le (1+\varepsilon) \norm{x} \quad \text{for every } x \in \operatorname{col}(A).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-06811a2d05bdccddd7b3c3079ed47729_l3.png "Rendered by QuickLaTeX.com")
 denotes the
denotes the  .
. matrix.
matrix. (one million) and output dimension
(one million) and output dimension  . For the SRTT, we use the
. For the SRTT, we use the  .
.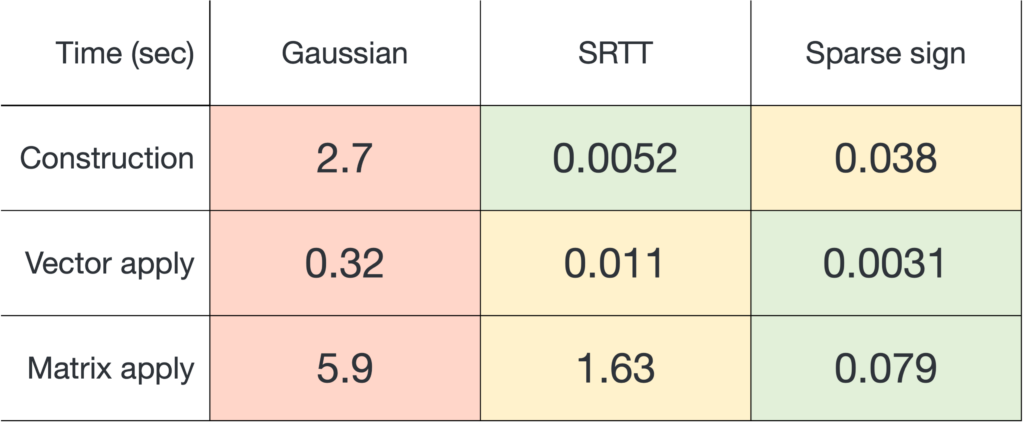
 and applying it to a matrix
and applying it to a matrix  , sparse sign embeddings are 14× faster than SRTTs and 73× faster than Gaussian embeddings.
, sparse sign embeddings are 14× faster than SRTTs and 73× faster than Gaussian embeddings. for
for  and
and  using the MATLAB
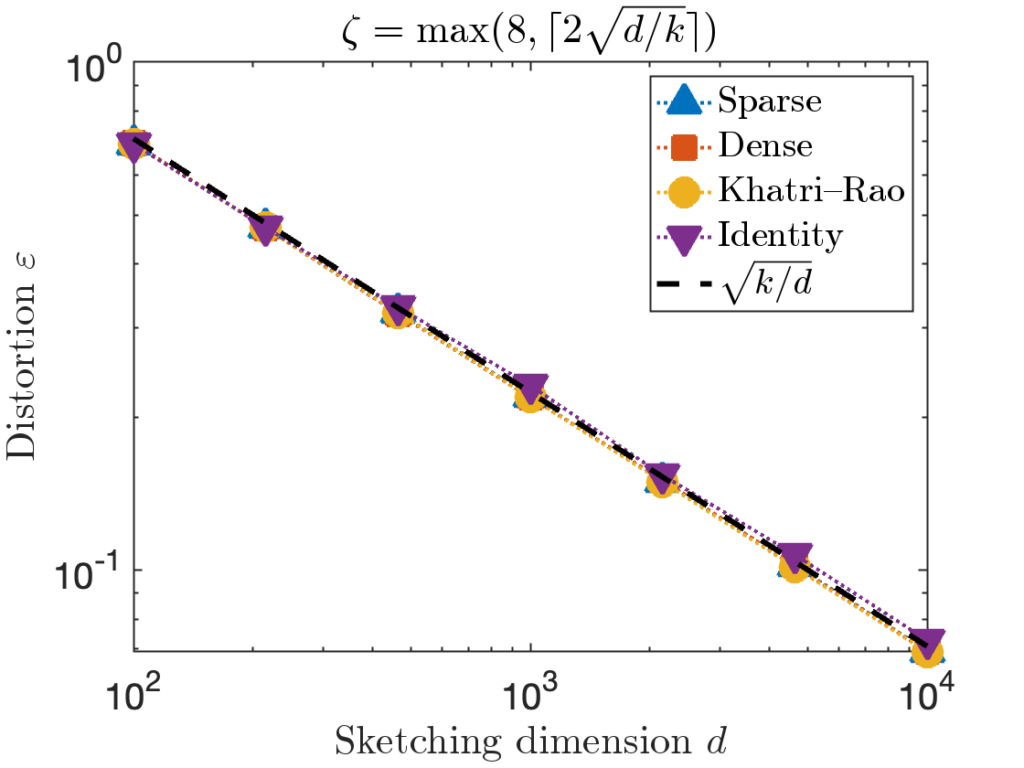
using the MATLAB  between 100 and 10,000. We report the distortion averaged over 100 trials. The theoretically predicted value
between 100 and 10,000. We report the distortion averaged over 100 trials. The theoretically predicted value  (equivalently,
(equivalently,  ) is shown as a dashed line.
) is shown as a dashed line.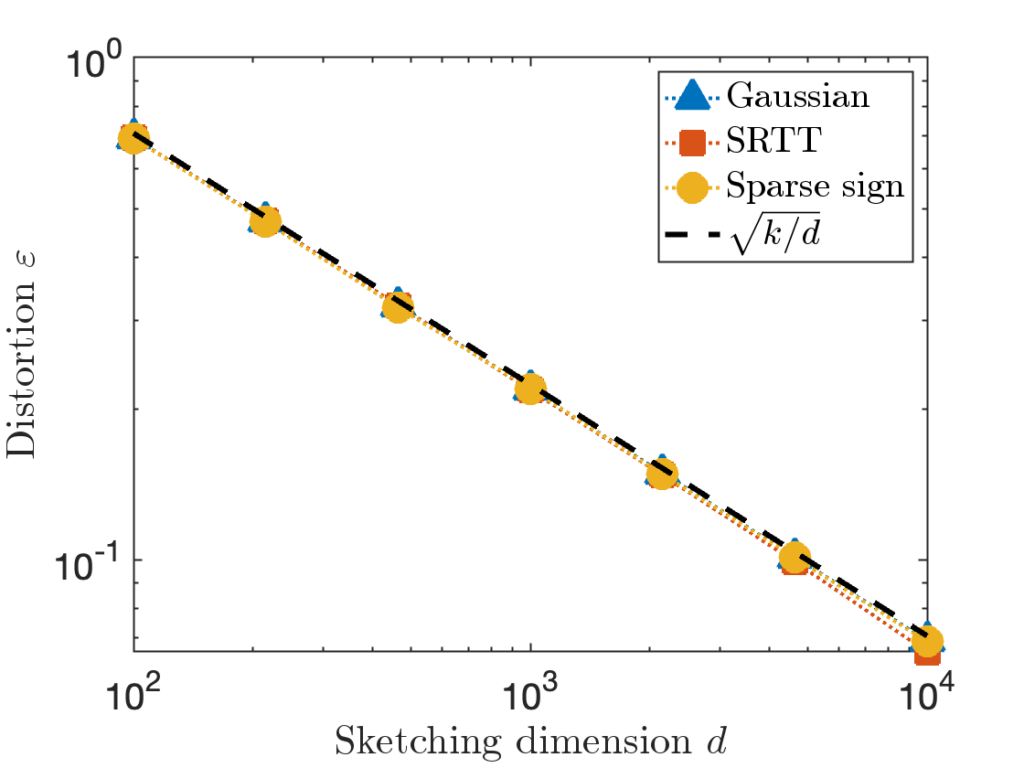
 is taken to be a matrix with independent standard Gaussian random values.
is taken to be a matrix with independent standard Gaussian random values. is taken to be the
is taken to be the  is taken to be the
is taken to be the  identity matrix stacked onto a
identity matrix stacked onto a  matrix of zeros.
matrix of zeros.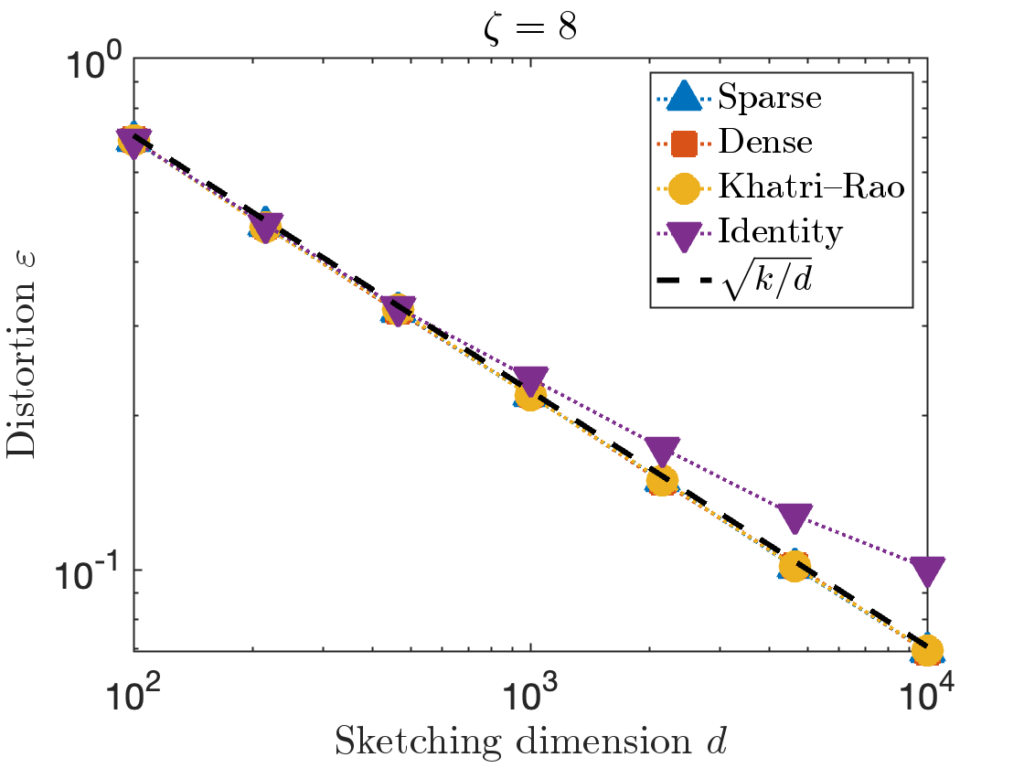
 . However, for the last test matrix “Identity”, we see the distortion begins to slightly exceed this predicted distortion for
. However, for the last test matrix “Identity”, we see the distortion begins to slightly exceed this predicted distortion for  .
. , we can increase the value of the sparsity parameter
, we can increase the value of the sparsity parameter  . We recommend
. We recommend ![\[\zeta = \max \left( 8 , \left\lceil 2\sqrt{\frac{d}{k}} \right\rceil \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5f1ebe7695d9918399b0f97b628fcce1_l3.png "Rendered by QuickLaTeX.com")
 can be necessary to achieve the optimal distortion.
can be necessary to achieve the optimal distortion.![\[S = \frac{1}{\sqrt{\zeta}} \begin{bmatrix} s_1 & \cdots & s_n \end{bmatrix}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4871e53b2bb59ad11946f2d1eafc66f7_l3.png "Rendered by QuickLaTeX.com")
 is an independent and randomly generated to contain exactly
is an independent and randomly generated to contain exactly ![\[(1-\varepsilon) \norm{x} \le \norm{Sx} \le (1+\varepsilon) \norm{x} \quad \text{for all }x \in \operatorname{col}(A).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-41fd14292c1c85cd318dde801a75e1bd_l3.png "Rendered by QuickLaTeX.com")
![\[d = \frac{k}{\varepsilon^2} \quad \text{and} \quad \zeta = \max\left(8,\frac{2}{\varepsilon}\right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-ed85cec8dadffec7c7a3b4e099d6637d_l3.png "Rendered by QuickLaTeX.com")
 . The value
. The value  has demonstrated deficiencies and should almost always be avoided (see below). The scaling
has demonstrated deficiencies and should almost always be avoided (see below). The scaling  is derived from the
is derived from the ![\[d = \mathcal{O} \left( \frac{k \log k}{\varepsilon^2} \right) \quad \text{and} \quad \zeta = \mathcal{O}\left( \frac{\log k}{\varepsilon} \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4fb6d0d60c85bc8a60d95bb0a19e63d6_l3.png "Rendered by QuickLaTeX.com")
 factor and the lack of explicit constants in the
factor and the lack of explicit constants in the  and can also be generated using a single line. The real challenge to generating sparse sign embeddings in MATLAB is the row indices, since each batch of
and can also be generated using a single line. The real challenge to generating sparse sign embeddings in MATLAB is the row indices, since each batch of  sparse sign embedding with sparsity
sparse sign embedding with sparsity  and weights
and weights  . To apply
. To apply  and reweight them using the weights:
and reweight them using the weights:![\[b \in \real^n \longmapsto Sb = (w_1 b_{i_1},\ldots,w_db_{i_d}) \in \real^d.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-712b97fc6f6efb9bf9a40dac2a652f5c_l3.png "Rendered by QuickLaTeX.com")
 for the hard “Identity” test matrix used above.
for the hard “Identity” test matrix used above.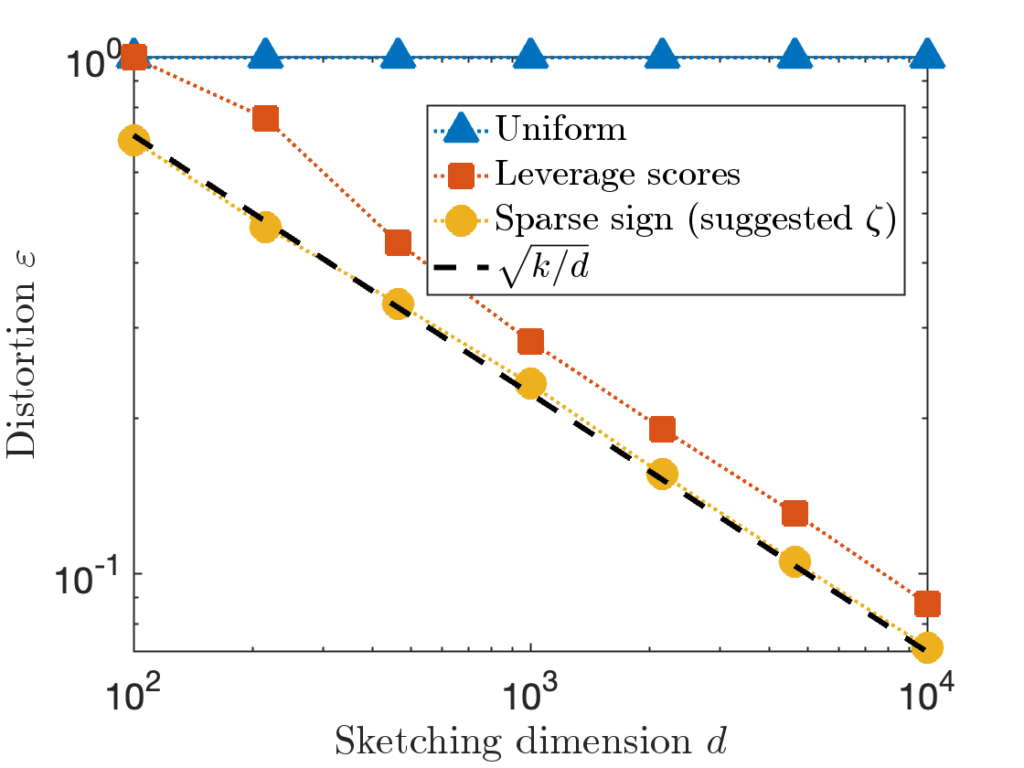
 for each row of
for each row of  cost, much higher than other types of sketches.
cost, much higher than other types of sketches. , and compare the distortion of CountSketch to the sparse sign embedding with parameters
, and compare the distortion of CountSketch to the sparse sign embedding with parameters  :
: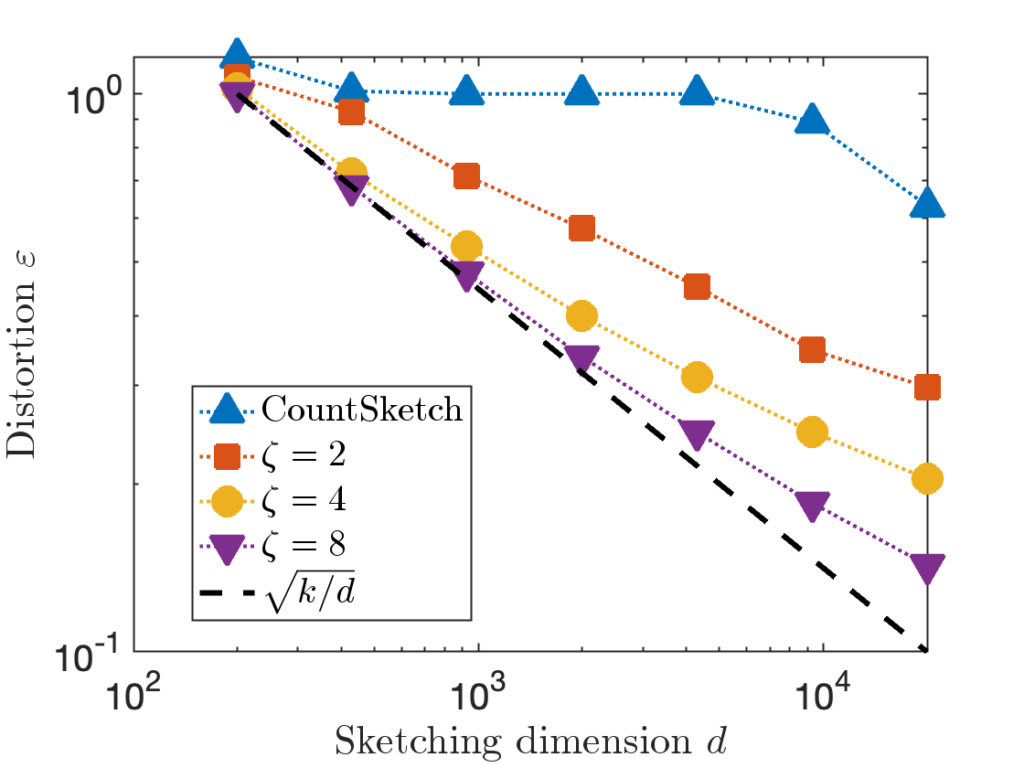
 , 20× higher than
, 20× higher than  in order to achieve distortion
in order to achieve distortion  (or perhaps
(or perhaps  ). This difference between
). This difference between  for CountSketch and
for CountSketch and  for other sketching matrices is a at the root of CountSketch’s woefully bad performance on some inputs.
for other sketching matrices is a at the root of CountSketch’s woefully bad performance on some inputs. is an informal symbol meaning “proportional to”.
is an informal symbol meaning “proportional to”. . This is Theorem 16 in
. This is Theorem 16 in  , where
, where  is a CountSketch of size
is a CountSketch of size  and
and  is a Gaussian sketching matrix of size
is a Gaussian sketching matrix of size  .
. is a CountSketch matrix with output dimension
is a CountSketch matrix with output dimension  , then the distortion of
, then the distortion of  with high probability.
with high probability.![\[SA = \begin{bmatrix} s_1 & \cdots & s_k \end{bmatrix}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-82c7ea0e5c52b6bd9bdb389f3d3f92d7_l3.png "Rendered by QuickLaTeX.com")
 has a single
has a single  in a uniformly random location
in a uniformly random location  .
.
 are not all different from each other, say
are not all different from each other, say  . Set
. Set  , where
, where  is the standard basis vector with
is the standard basis vector with  but
but  . Thus, for the distortion relation
. Thus, for the distortion relation ![\[(1-\varepsilon) \norm{x} =(1-\varepsilon)\sqrt{2} \le 0 = \norm{(SA)x}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b08feebb30829a0e73b02188eba6f901_l3.png "Rendered by QuickLaTeX.com")
 . Thus,
. Thus, ![\[\prob \{ \varepsilon \ge 1 \} \ge \prob \{ j_1,\ldots,j_k \text{ are not distinct} \}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-12fa7b716b97c7e9482f4f6327bd4728_l3.png "Rendered by QuickLaTeX.com")
 pairs of people. Each pair of people has a
pairs of people. Each pair of people has a  chance of sharing a birthday, so the expected number of birthdays in a room of 23 people is
chance of sharing a birthday, so the expected number of birthdays in a room of 23 people is  . Since are 0.69 birthdays shared on average in a room of 23 people, it is perhaps less surprising that 23 is the critical number at which the chance of two people sharing a birthday exceeds 50%.
. Since are 0.69 birthdays shared on average in a room of 23 people, it is perhaps less surprising that 23 is the critical number at which the chance of two people sharing a birthday exceeds 50%. and
and  in CountSketch have a
in CountSketch have a  chance of being the same. There are
chance of being the same. There are  pairs of indices, so the expected number of equal indices
pairs of indices, so the expected number of equal indices  . Thus, we should anticipate
. Thus, we should anticipate  is required to ensure that
is required to ensure that ![\[\prob \{ j_1,\ldots,j_k \text{ are not distinct} \} = 1 - \prob \{ j_1,\ldots,j_k \text{ are distinct} \}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-338a38501a565185b794f8ed03803c9a_l3.png "Rendered by QuickLaTeX.com")
 are all distinct, the probability
are all distinct, the probability  are distinct is just the probability that
are distinct is just the probability that  values
values ![\[\prob\{ j_1,\ldots,j_i \text{ are distinct} \mid j_1,\ldots,j_{i-1} \text{ are distinct}\} = 1 - \frac{i-1}{d}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b474f00c44e53b7c3c398d56121e1ac3_l3.png "Rendered by QuickLaTeX.com")
![\[\prob \{ j_1,\ldots,j_k \text{ are distinct} \} = \prod_{i=1}^k \left(1 - \frac{i-1}{d} \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7dd28281f8dbed8b3a1452a21e7410c8_l3.png "Rendered by QuickLaTeX.com")
 for every
for every  , obtaining
, obtaining![\[\mathbb{P} \{ j_1,\ldots,j_k \text{ are distinct} \} \le \prod_{i=0}^{k-1} \exp\left(-\frac{i}{d}\right) = \exp \left( -\frac{1}{d}\sum_{i=0}^{k-1} i \right) = \exp\left(-\frac{k(k-1)}{2d}\right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8d9d4c7d12af0fd89e53ca261c5df287_l3.png "Rendered by QuickLaTeX.com")
![\[\prob \{ \varepsilon \ge 1 \} \ge 1-\prob \{ j_1,\ldots,j_k \text{ are distinct} \\}\ge 1-\exp\left(-\frac{k(k-1)}{2d}\right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-144cfc73d778c4f9ed7442f5a6610e5e_l3.png "Rendered by QuickLaTeX.com")
![\[\prob\{\varepsilon \ge 1\} \ge \frac{1}{2} \quad \text{if} \quad d \le \frac{k(k-1)}{2\ln 2}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e11567078a415b79b06a8e5e6f0b1600_l3.png "Rendered by QuickLaTeX.com")
 or perhaps a tall matrix
or perhaps a tall matrix  . A sketching matrix is a
. A sketching matrix is a  matrix
matrix  . When multiplied into a high-dimensional vector
. When multiplied into a high-dimensional vector 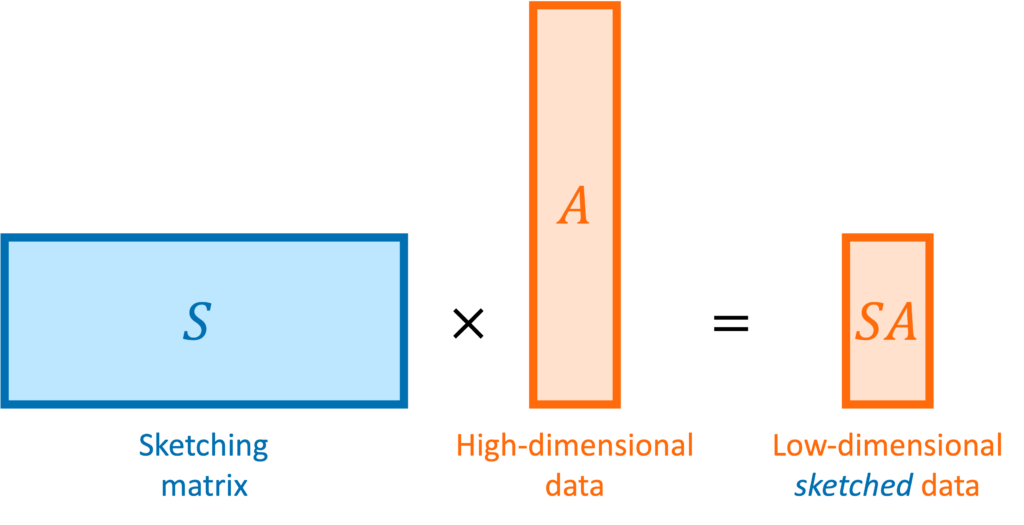
 be a collection of vectors. For
be a collection of vectors. For  , we require that
, we require that  :
: ![\[(1-\varepsilon) \norm{x}\le\norm{Sx}\le(1+\varepsilon)\norm{x} \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-735df49a45ff5d0bb27d478569004bdd_l3.png "Rendered by QuickLaTeX.com")
![\[\operatorname{col}(A) \coloneqq \{ Ax : x \in \real^k \}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5ecde6b43df29caba14fd43682b4cc86_l3.png "Rendered by QuickLaTeX.com")
 with an output dimension of roughly
with an output dimension of roughly  . In particular, the sketching dimension
. In particular, the sketching dimension  elements) or dimension (
elements) or dimension ( requires roughly
requires roughly  operations, rather than the
operations, rather than the  operations we would expect to multiply a
operations we would expect to multiply a  is
is ![\[S = \sqrt{\frac{n}{d}} \cdot R \cdot F \cdot D.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-92095cbf9c7d55273bd572a33debe415_l3.png "Rendered by QuickLaTeX.com")
 is a diagonal matrix whose entries are each a random
is a diagonal matrix whose entries are each a random  is a fast trigonometric transform such as a fast
is a fast trigonometric transform such as a fast  is a selection matrix. To generate
is a selection matrix. To generate  , let
, let  , selected without replacement.
, selected without replacement.  for every vector
for every vector  and the
and the  , and
, and  operations, a significant improvement over the
operations, a significant improvement over the  , larger than for a Gaussian sketch.
, larger than for a Gaussian sketch.![\[S = \frac{1}{\sqrt{\zeta}} \begin{bmatrix} s_1 & s_2 & \cdots & s_n \end{bmatrix}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-bb5806806e2e5900d4351c08befbd82e_l3.png "Rendered by QuickLaTeX.com")
 nonzero entries. The parameter
nonzero entries. The parameter  in practice.
in practice. or
or  operations) to apply to a vector, depending on parameter choices (see below). With a good sparse matrix library, sparse sign embeddings are often the fastest sketching matrix by a wide margin.
operations) to apply to a vector, depending on parameter choices (see below). With a good sparse matrix library, sparse sign embeddings are often the fastest sketching matrix by a wide margin. random numbers, higher than SRTTs (roughly
random numbers, higher than SRTTs (roughly  numbers).
numbers).  ; the theoretically sanctioned sketching dimension (at least according to existing theory) is larger than for a Gaussian sketch. In practice, we can often get away with using
; the theoretically sanctioned sketching dimension (at least according to existing theory) is larger than for a Gaussian sketch. In practice, we can often get away with using  .
. operations. Therefore, sketching offers the promise of speeding up linear algebraic computations involving
operations. Therefore, sketching offers the promise of speeding up linear algebraic computations involving ![\[\operatorname*{minimize}_{x\in\real^k} \norm{Ax - b}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-07528304ce875f54aa1173062c5ec10a_l3.png "Rendered by QuickLaTeX.com")
 . Applying
. Applying ![\[\operatorname*{minimize}_{\hat{x}\in\real^k} \norm{(SA)\hat{x} - Sb}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7110d3e9c1dd7e29793603a5bafdd201_l3.png "Rendered by QuickLaTeX.com")
 is the sketch-and-solve solution to the least-squares problem, which we can use as an approximate solution to the original least-squares problem.
is the sketch-and-solve solution to the least-squares problem, which we can use as an approximate solution to the original least-squares problem.
 , first apply sketching to obtain
, first apply sketching to obtain  and then apply an out-of-the-box clustering algorithms like
and then apply an out-of-the-box clustering algorithms like  denote the optimal least-squares solution and let
denote the optimal least-squares solution and let ![\[\norm{A\hat{x} - b} \le \frac{1+\varepsilon}{1-\varepsilon} \norm{Ax - b}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3d1d034bd8bf93f1c15e435a27a355ee_l3.png "Rendered by QuickLaTeX.com")
 , then this bound tells us that
, then this bound tells us that ![\[\norm{A\hat{x} - b} \le 2\norm{Ax_\star - b}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-588170743415f491f48ef2adc3d46628_l3.png "Rendered by QuickLaTeX.com")
 . For such applications, the bound (4) ensures that
. For such applications, the bound (4) ensures that  . Often, this means
. Often, this means  , measuring how close
, measuring how close  and residual norm
and residual norm  ). Then, we generate a sparse sign embedding of dimension
). Then, we generate a sparse sign embedding of dimension  ). Then, we compute the sketch-and-solve solution and, as reference, a “direct” solution by
). Then, we compute the sketch-and-solve solution and, as reference, a “direct” solution by  , close to direct method’s residual norm of
, close to direct method’s residual norm of  . However, the forward error of sketch-and-solve is
. However, the forward error of sketch-and-solve is  nine orders of magnitude larger than the direct method’s forward error of
nine orders of magnitude larger than the direct method’s forward error of  .
. , to decrease the distortion by a factor of ten requires increasing the sketching dimension
, to decrease the distortion by a factor of ten requires increasing the sketching dimension  that we hope will converge at a rapid rate to the true least-squares solution,
that we hope will converge at a rapid rate to the true least-squares solution,  , then
, then  .
.![\[SA = QR,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-9edf84077821e9e0cd0c772b77024799_l3.png "Rendered by QuickLaTeX.com")
![\[A^\top A \approx (SA)^\top (SA) = R^\top Q^\top Q R = R^\top R.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-90e14ee1172525fd795980cb3ef1a647_l3.png "Rendered by QuickLaTeX.com")
 since
since  has orthonormal columns. The conclusion is that
has orthonormal columns. The conclusion is that  .
.
![\[(A^\top A)x = A^\top b. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3f3c5265345a169d6633a759854510da_l3.png "Rendered by QuickLaTeX.com")
 by
by  in (5) and solving. The resulting solution is
in (5) and solving. The resulting solution is![\[x_0 = R^{-1} (R^{-\top}(A^\top b)).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6b63093ea5c1d9714fb0deab43fc4dc3_l3.png "Rendered by QuickLaTeX.com")
 will typically not be a good solution to the least-squares problem (2), so we need to iterate. To do so, we’ll try and solve for the error
will typically not be a good solution to the least-squares problem (2), so we need to iterate. To do so, we’ll try and solve for the error  . To derive an equation for the error, subtract
. To derive an equation for the error, subtract  from both sides of the normal equations (5), yielding
from both sides of the normal equations (5), yielding ![\[(A^\top A)(x-x_0) = A^\top (b-Ax_0).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4f1ee993844dbcd8e397f27ccd1deefb_l3.png "Rendered by QuickLaTeX.com")
 :
: ![\[x\approx x_1 \coloneqq x_0 + R^{-\top}(R^{-1}(A^\top(b-Ax_0))).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0496d7e3c8bc117e658c57fc167081be_l3.png "Rendered by QuickLaTeX.com")
 , approximate
, approximate  , and obtain a new approximate solution
, and obtain a new approximate solution  . Continuing this process, we obtain an iteration
. Continuing this process, we obtain an iteration![\[x_{i+1} = x_i + R^{-\top}(R^{-1}(A^\top(b-Ax_i))).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f8db238fc978e6a8fc968fc5e387ec27_l3.png "Rendered by QuickLaTeX.com")
 at every iteration. Later,
at every iteration. Later, 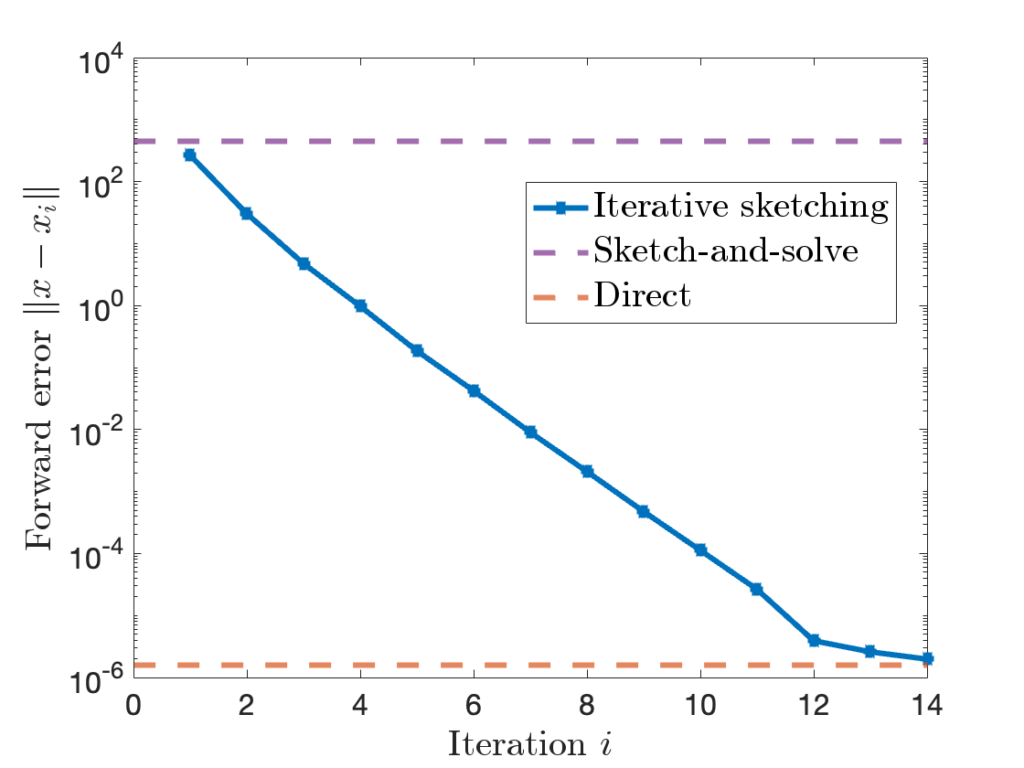
 to
to  , the accuracy of the iterative sketching solution
, the accuracy of the iterative sketching solution  can be quite high.
can be quite high.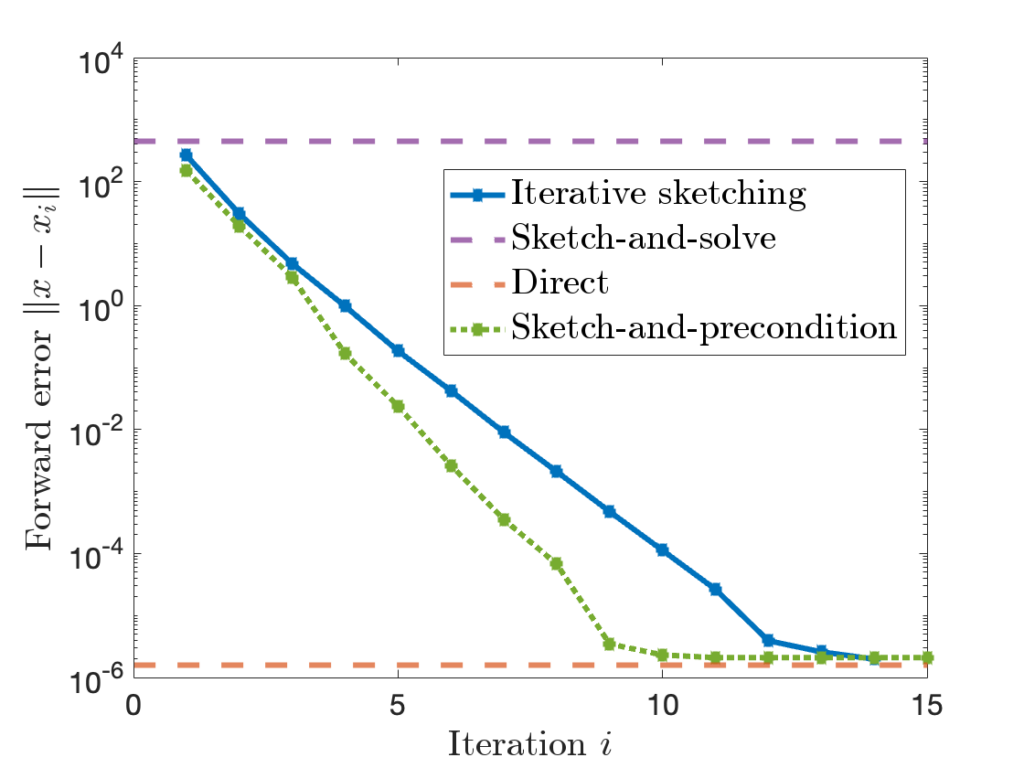
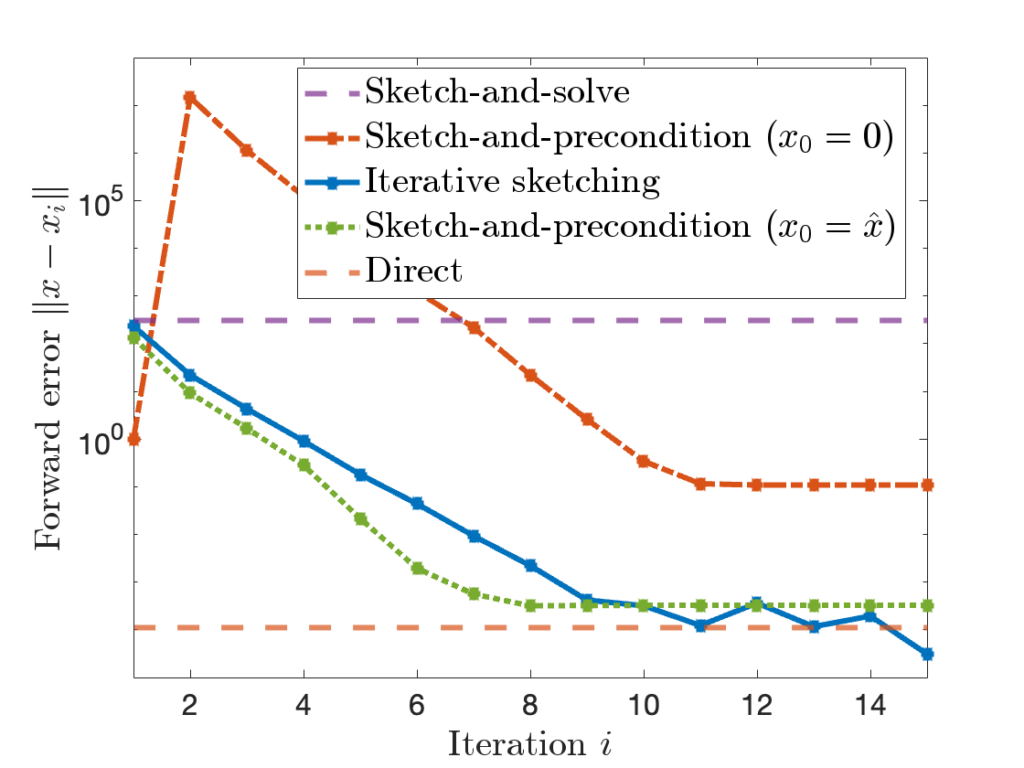
 is comparable to accuracy of a standard
is comparable to accuracy of a standard  , sketch-and-precondition is not forward stable. The maximum achievable accuracy was worse than standard solvers by orders of magnitude! Maybe sketching doesn’t work after all?
, sketch-and-precondition is not forward stable. The maximum achievable accuracy was worse than standard solvers by orders of magnitude! Maybe sketching doesn’t work after all? for sketch-and-precondition, then sketch-and-precondition appears to be forward stable in practice. No theoretical analysis supporting this finding is known at present.
for sketch-and-precondition, then sketch-and-precondition appears to be forward stable in practice. No theoretical analysis supporting this finding is known at present. and residual
and residual  .
.
 a
a  and
and  are defined. Then
are defined. Then ![f(\mathbb{E}X) \le \mathbb{E} [f(X)]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-be01f50345229c7ba054de409859eec8_l3.png "Rendered by QuickLaTeX.com") .
. , there exists a slope
, there exists a slope  for all
for all  and
and  and take expectations to conclude that
and take expectations to conclude that![\[\mathbb{E}[m(X - \mathbb{E}X) + f(\mathbb{E}X)] = f(\mathbb{E}X) \le \mathbb{E} [f(X)].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c162fcb6103e44c65d3c6e1d003135d0_l3.png "Rendered by QuickLaTeX.com")
 for two numbers
for two numbers  and
and  . This may hard to do directly. With the interpolation method, I first construct a family of numbers
. This may hard to do directly. With the interpolation method, I first construct a family of numbers  ,
,  , such that
, such that  and
and  and show that
and show that  is (weakly) increasing in
is (weakly) increasing in  . This is typically accomplished by showing the derivative is nonnegative:
. This is typically accomplished by showing the derivative is nonnegative:![\[\frac{d}{dt} A_t \ge 0.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7d87bd05d1a5b326f575b2b72f27cc74_l3.png "Rendered by QuickLaTeX.com")
 for some
for some  for any Gaussian random variable
for any Gaussian random variable  .
.![\[f(0) \le \mathbb{E} [f(X)].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8e5dd3a04978ca82dd4d50fd41f8ca43_l3.png "Rendered by QuickLaTeX.com")
![\[A_t = \mathbb{E} [ f(X_t) ],\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8f12251961aff234ee138a29978a264b_l3.png "Rendered by QuickLaTeX.com")
 starts with no randomness and
starts with no randomness and  is our standard Gaussian. To interpolate between these extremes, we increase the variance linearly from
is our standard Gaussian. To interpolate between these extremes, we increase the variance linearly from  to
to ![\[A_t = \mathbb{E} [ f(X_t)] \quad \text{where $X_t\sim\mathcal{N}(0,t)$}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-88cc0a1a3f5c52e8349fd6c4ca28ad7c_l3.png "Rendered by QuickLaTeX.com")
 denotes a Gaussian random variable with zero mean and variance
denotes a Gaussian random variable with zero mean and variance  denote a small parameter which we will later send to zero. For us, the key fact will be that a
denote a small parameter which we will later send to zero. For us, the key fact will be that a  can be realized as a sum of independent
can be realized as a sum of independent  and
and  random variables. Therefore, we write
random variables. Therefore, we write![\[X_{t+\delta} = X_t + \Delta \quad \text{where $\Delta \sim \mathcal{N}(0,\delta)$ is independent of $X_t$.}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-eaaa1bd888269b9ad51b88afb5fc3d08_l3.png "Rendered by QuickLaTeX.com")
 by using Taylor’s formula
by using Taylor’s formula![\[f(X_t+\Delta) = f(X_t) + f'(X_t)\Delta + \frac{1}{2} f''(X_t) \Delta^2 + \frac{1}{6} f'''(\xi) \Delta^3, \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-38d38dde93cc24a3101649064d5af389_l3.png "Rendered by QuickLaTeX.com")
 lies between
lies between  and
and  . Now, take expectations,
. Now, take expectations, ![\[\mathbb{E}[ f(X_t+\Delta)]=\mathbb{E}[f(X_t)] + \mathbb{E}[f'(X_t)\Delta] + \frac{1}{2} \mathbb{E}[f''(X_t)] \mathbb{E}[\Delta^2] + \underbrace{\frac{1}{6} \mathbb{E}[f'''(\xi) \Delta^3]}_{:=\mathrm{Rem}(\delta)}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-ccacfa2622a31446e66624a9a8458dc4_l3.png "Rendered by QuickLaTeX.com")
 has mean zero and variance
has mean zero and variance  so this gives
so this gives![\[\mathbb{E} [f(X_t+\Delta)]=\mathbb{E}[f(X_t)] + \delta \frac{1}{2} \mathbb{E}[f''(X_t)] + \mathrm{Rem}(\delta).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-d021f960b2367c41cf18dc25661045c6_l3.png "Rendered by QuickLaTeX.com")
 vanishes as
vanishes as  . Thus, we can rearrange this expression to compute the derivative:
. Thus, we can rearrange this expression to compute the derivative:![\[\frac{d}{dt} A_t = \lim_{\delta \downarrow 0} \frac{\mathbb{E} f(X_t+\Delta)-\mathbb{E}[f(X_t)]}{\delta} = \lim_{\delta \downarrow 0} \frac{1}{2} \mathbb{E}[f''(X_t)] + \frac{\mathrm{Rem}(\delta)}{\delta} = \frac{1}{2} \mathbb{E}[f''(X_t)].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3275fd914e25d0f6985eb4d1ca419fb7_l3.png "Rendered by QuickLaTeX.com")
 for every
for every ![\[\frac{d}{dt} A_t \ge 0 \quad \text{for all } t\in [0,1].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-258c784d449d2b53c0a462ff38f3cdd8_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E} f(X) = f(0) + \frac{1}{2} \int_0^1 \mathbb{E} [f''(X_t)] \, dt.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-50be5d67c30ff436025f45185c2fae22_l3.png "Rendered by QuickLaTeX.com")

![\[f''(x) \le \beta \quad \text{for every } x \in \real,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-206d02bd0b654ab4c42cf33921d5383d_l3.png "Rendered by QuickLaTeX.com")
![\[f(0) \le \mathbb{E} f(X) \le f(0) + \frac{1}{2}\beta.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8561680db386f740b927a84c7cb9fe0d_l3.png "Rendered by QuickLaTeX.com")
 . Let’s do this. As an exercise, you can verify that our technical regularity condition implies
. Let’s do this. As an exercise, you can verify that our technical regularity condition implies  . Thus, by Hölder’s inequality and setting
. Thus, by Hölder’s inequality and setting  ), we obtain
), we obtain![\[\frac{|\mathrm{Rem}(\delta)|}{\delta} = \frac{|\mathbb{E}[f'''(\xi) \Delta^3]|}{6\delta} \le \frac{(|\mathbb{E} |f'''(\xi)|^p)^{1/p}| (\mathbb{E} |\Delta|^{3q})^{1/q}}{6\delta}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e1078e0f2d2c17b77bd87a38665c03e4_l3.png "Rendered by QuickLaTeX.com")
 where
where  is a function of
is a function of  as
as  .
. , defined for each
, defined for each  . Rather than treating these quantities as independent, we can think of them as a collective, comprising a random function
. Rather than treating these quantities as independent, we can think of them as a collective, comprising a random function  known as a
known as a 
![\[df = f'(x) \, dx\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a32870f7f5981a412b96de2591534280_l3.png "Rendered by QuickLaTeX.com")
 of a Brownian motion, the analog is
of a Brownian motion, the analog is ![\[df = f'(X_t) \, dX_t + \frac{1}{2} f''(X_t) \, dt.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e2eadd9f0624f41b562d90fe0568ef69_l3.png "Rendered by QuickLaTeX.com")
 over a time interval
over a time interval  ,
,  is a random variable with mean
is a random variable with mean ![\[f(\mathbb{E}Y) \le \mathbb{E}[f(Y)].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-97693077e012820448760d2e7ad31d58_l3.png "Rendered by QuickLaTeX.com")
 and
and  denote the cumulative distribution functions of
denote the cumulative distribution functions of ![\[g(X) := \inf \{ \alpha \in \real : F_Y(\alpha) \ge F_X(X) \}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-2c40cdc3f3bcf589f930aeb87340491b_l3.png "Rendered by QuickLaTeX.com")
 and
and ![\[A_t \stackrel{?}{=} \mathbb{E} [f(g(X_t))].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0de3d1811026212f153ea79469649149_l3.png "Rendered by QuickLaTeX.com")
![A_0 = \mathbb{E}[f(g(0))]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e6ac6421e3fc94f2087614f41336491a_l3.png "Rendered by QuickLaTeX.com") does not even equal to
does not even equal to ![\mathbb{E} [f(Y)]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-06983640d9e119e9aa44cdd209c540c7_l3.png "Rendered by QuickLaTeX.com") ! Instead, we must define
! Instead, we must define![\[A_t = \mathbb{E} [f(\mathbb{E}[g(X_1) \mid X_t])].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-19560c3c89aa3987101e6650af24a0a7_l3.png "Rendered by QuickLaTeX.com")
 conditional on the Brownian motion
conditional on the Brownian motion ![\[\frac{d}{dt} A_t \ge 0 \quad \text{for all }t\in [0,1].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-253003b644ae67d253cdfd74378c71a9_l3.png "Rendered by QuickLaTeX.com")
 are “somewhat dependent”, for which functions does the multivariate Jensen’s inequality
are “somewhat dependent”, for which functions does the multivariate Jensen’s inequality  )
) ![\[f(\mathbb{E} Y_1,\ldots,\mathbb{E}Y_n) \le \mathbb{E} [f(Y_1,\ldots,Y_n)] \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-2467fe840ba04173b1a3adc7c38a945c_l3.png "Rendered by QuickLaTeX.com")
![\[\text{($\star$) holds if $f$ is convex in each coordinate, separately.}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-521f389e0e1a83728c2544ecb889a047_l3.png "Rendered by QuickLaTeX.com")
 of Gaussian random variables
of Gaussian random variables  . We will use the covariance matrix
. We will use the covariance matrix  of the Gaussian random variables
of the Gaussian random variables ![\[f(\mathbb{E}g_1(X_1),\ldots,\mathbb{E}g_n(X_n)) \le \mathbb{E} [f(g(X_1),\ldots,g(X_n))]\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-055c60480c4de2b28348bb1da12763ea_l3.png "Rendered by QuickLaTeX.com")
 if and only if
if and only if ![\[\Sigma \circ \nabla^2 f(x) \text{ is positive semidefinite} \quad \text{for all $x \in \real^n$}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-48ca7d18e3bbcee337d072bd27efe791_l3.png "Rendered by QuickLaTeX.com")
 is the
is the  denotes the
denotes the  are equal (and variance one),
are equal (and variance one),  for all
for all ![\[\Sigma \circ \nabla^2 f(x) = \mathrm{diag} \left( \frac{\partial^2 f}{\partial x_i^2} : i=1,\ldots,n \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-ef80f7d5a452131378d194e3560717b0_l3.png "Rendered by QuickLaTeX.com")
 : this is precisely the condition for
: this is precisely the condition for  , estimate its trace
, estimate its trace  .
.![\[\hat{\tr} = \frac{1}{m} \sum_{i=1}^m \omega_i^* A \omega_i. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a287886ee24c9ab99dfe35b6cdae83cf_l3.png "Rendered by QuickLaTeX.com")
 are random vectors, usually chosen to be
are random vectors, usually chosen to be  denotes the
denotes the  .
.![\[\mathbb{E} [\omega_i\omega_i^*] = I, \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-74bb76367ad1408bd538d049774cf990_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E} [\hat{\tr}] = \tr A.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f6407c7a741003cc20780e72d050cb56_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E} [\hat{\tr}] = \mathbb{E} \left[ \frac{1}{m} \sum_{i=1}^m \omega_i^*A\omega_i \right] = \frac{1}{m} \sum_{i=1}^m \mathbb{E} \left[ \omega_i^* A \omega_i\right]. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-52eebd003a597cac5b2c69f7b6e537e8_l3.png "Rendered by QuickLaTeX.com")
![\mathbb{E} [\hat{\tr}] = \tr A](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-96f71a1b054ffed9e316cf9cb7a16c5c_l3.png "Rendered by QuickLaTeX.com") , it is sufficient to prove that
, it is sufficient to prove that ![\mathbb{E} \left[\omega_i^*A\omega_i\right] = \tr A](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-120169dca277175c51f09b6f320cf5fa_l3.png "Rendered by QuickLaTeX.com") for each
for each  matrix, then a number equals its trace,
matrix, then a number equals its trace,  . The second trick is the
. The second trick is the  matrix
matrix  and a
and a  matrix
matrix  , we have
, we have  . The cyclic property
. The cyclic property ![\[\tr[BCD] = \tr[(BC)D] = \tr[D(BC)] = \tr[DBC].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-cc1cd4920a2431e93b5453b5373999e3_l3.png "Rendered by QuickLaTeX.com")
![\[\tr [BCD] \ne \tr[CBD] \quad \text{in general}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f563660fc58383a37ae7bedea16b2b9c_l3.png "Rendered by QuickLaTeX.com")
 as beads on a closed loop of string. One can move the last bead
as beads on a closed loop of string. One can move the last bead ![\tr [BCD] = \tr[DBC]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7656627b133add21ab8765532def07d6_l3.png "Rendered by QuickLaTeX.com") , but not interchange two beads,
, but not interchange two beads, ![\tr[BCD] \ne \tr[CBD]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0f43e4f72510a69b596f7b9f7504dd58_l3.png "Rendered by QuickLaTeX.com") .
.![\[\mathbb{E} \left[\omega_i^*A\omega_i\right] = \mathbb{E} \tr \left[\omega_i^*A\omega_i\right] = \mathbb{E} \tr \left[A\omega_i\omega_i^*\right].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b1bb373766e64179bc0635f058a07f3f_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E} \left[\omega_i^*A\omega_i\right] = \mathbb{E} \tr \left[A\omega_i\omega_i^*\right] = \tr(A \mathbb{E}[\omega_i\omega_i^*] ).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1d10f835c99efab005f0ad12cdb5647b_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E} \left[\omega_i^*A\omega_i\right] = \tr(A \mathbb{E}[\omega_i\omega_i^*] ) = \tr(A\cdot I) = \tr A.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b51781498146df3547c1503e451ad682_l3.png "Rendered by QuickLaTeX.com")
 ‘s are isotropic (3) and now assume that
‘s are isotropic (3) and now assume that ![\[\Var(\hat{\tr}) = \frac{1}{m^2} \sum_{i=1}^m \Var(\omega_i^*A\omega_i).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-d9398dc43178ba9bb72aead0214e77c8_l3.png "Rendered by QuickLaTeX.com")
 , we then get
, we then get![\[\Var(\hat{\tr}) = \frac{1}{m} \Var(\omega^*A\omega).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4501a18842234362f8f99d523c7c723e_l3.png "Rendered by QuickLaTeX.com")
 , which is characteristic of
, which is characteristic of ![\[\left| \hat{\tr} - \tr A \right| \lessapprox \frac{\mathrm{const}}{\sqrt{m}}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c735791b8fe88d627bc2ebad8137fb1e_l3.png "Rendered by QuickLaTeX.com")
 , I must do
, I must do  the work!
the work! and (root-mean-square) error at rates
and (root-mean-square) error at rates ![\[\Var(\hat{\tr}_{\text{H++ or X}}) \le \frac{\mathrm{const}}{m^2},\quad \left| \hat{\tr}_{\text{H++ or X}} - \tr A \right| \lessapprox \frac{\mathrm{const}}{m}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-87438d87094d3df389400b5f7abee24a_l3.png "Rendered by QuickLaTeX.com")
 that makes the variance of the single–sample estimate
that makes the variance of the single–sample estimate  as low as possible. In this section, we will provide several explicit formulas for the variance of the Girard–Hutchinson estimator. Derivations of these formulas will appear at the end of this post. These variance formulas help illuminate the benefits and drawbacks of different test vector distributions.
as low as possible. In this section, we will provide several explicit formulas for the variance of the Girard–Hutchinson estimator. Derivations of these formulas will appear at the end of this post. These variance formulas help illuminate the benefits and drawbacks of different test vector distributions. we use
we use  and
and  to denote the real and imaginary parts. The variance of a random complex number
to denote the real and imaginary parts. The variance of a random complex number ![\[\Var(z) := \mathbb{E} |z - \mathbb{E} z|^2 = \Var(\Re z) + \Var(\Im z).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8f636667a7dbbb3217896a962de1d28c_l3.png "Rendered by QuickLaTeX.com")
![\[\left\|A\right\|_{\rm F}^2 = \sum_{i,j} |A_{ij}|^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e132e4b9029c41dbfb99cd0e588d8d70_l3.png "Rendered by QuickLaTeX.com")
 , we have
, we have![\[\left\|A\right\|_{\rm F}^2 = \sum_{i=1}^n \lambda_i^2. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-06b272e602552353c020f6399347c748_l3.png "Rendered by QuickLaTeX.com")
 denotes the
denotes the  denotes the
denotes the  rather than the conjugate transpose
rather than the conjugate transpose  is a number, it is equal to its own transpose:
is a number, it is equal to its own transpose:![\[\omega^\top A \omega = (\omega^\top A \omega)^\top = \omega^\top A^\top \omega.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3d543dc0d4d64d3c28f0f291cd9c8e83_l3.png "Rendered by QuickLaTeX.com")
![\[\omega^\top A\omega = \frac{\omega^\top A \omega + \omega^\top A^\top \omega}{2} = \omega^\top \left( \frac{A + A^\top}{2} \right)\omega.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f1bbe4f0c983f73e2461b593b752f54a_l3.png "Rendered by QuickLaTeX.com")
 .
. .
.![\[\Var(\omega^\top A\omega) = 2 \left\|A\right\|_{\rm F}^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-091cf638fab943be5fd224acdb42668f_l3.png "Rendered by QuickLaTeX.com")
![\[\Var(\omega^\top A \omega) = 2\sum_{i\ne j} |A_{ij}|^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-74621dad79cb3f06a8b70c661df4e01d_l3.png "Rendered by QuickLaTeX.com")
 are uniformly distributed on the real sphere of radius
are uniformly distributed on the real sphere of radius  .
. ![\[\Var(\omega^\top A\omega) = \frac{2n}{n+2} \left( \left\|A\right\|_{\rm F}^2 - \frac{1}{n} |\tr A|^2 \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1e419b8da9b953a0b8b914df9e89f8c6_l3.png "Rendered by QuickLaTeX.com")
![\[A = A^{\rm H} + i A^{\rm SH}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-d61da43cd6497ceefd2306aabb52ee67_l3.png "Rendered by QuickLaTeX.com")
![\[A^{\rm H} = \frac{A+A^*}{2} ,\quad A^{\rm SH} = \frac{A - A^*}{2i}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-dc287a49a59dca9421fdd2bef6be5334_l3.png "Rendered by QuickLaTeX.com")
 is skew-Hermitian). Since
is skew-Hermitian). Since  and
and  are both Hermitian, we have
are both Hermitian, we have![\[\Re(\omega^* A\omega) = \omega^* A^{\rm H} \omega, \quad \Im (\omega^* A \omega) = \omega^* A^{\rm SH} \omega.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6809a35cd06d92218ce8d597847f74bd_l3.png "Rendered by QuickLaTeX.com")
 can be broken into Hermitian and skew-Hermitian parts:
can be broken into Hermitian and skew-Hermitian parts:![\[\Var(\omega^* A\omega) = \Var(\omega^* A^{\rm H}\omega) + \Var(\omega^* A^{\rm SH}\omega).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e4658c38df479c5805dabd94b64cc0b3_l3.png "Rendered by QuickLaTeX.com")
 .
. for
for  standard normal random variables.
standard normal random variables. ![\[\Var(\omega^* A\omega) = \left\|A\right\|_{\rm F}^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1beb66e032d83431dac6f8e0d6655eec_l3.png "Rendered by QuickLaTeX.com")
 .
. ![\[\Var(\omega^* A \omega) = \sum_{i\ne j} |A_{ij}|^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1cb0e8df66c34056cd350752070af17a_l3.png "Rendered by QuickLaTeX.com")
 .
. ![\[\Var(\omega^* A\omega) = \frac{n}{n+1} \left( \left\|A\right\|_{\rm F}^2 - \frac{1}{n} |\tr A|^2 \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-aacfa2afb45905f6abe0697c769cd1b7_l3.png "Rendered by QuickLaTeX.com")
 are isotropic (2), independent from each other, and have independent entries, then for any fixed real symmetric matrix
are isotropic (2), independent from each other, and have independent entries, then for any fixed real symmetric matrix  .
. -valued and an
-valued and an  -valued test vectors on unified footing, let
-valued test vectors on unified footing, let  denote either
denote either  ) or a complex Hermitian matrix (if
) or a complex Hermitian matrix (if  ). Let a
). Let a  of
of ![\[\text{If $A \in \mathscr{A}$ and $U$ is $\field$-unitary, then $U^*AU \in \mathscr{A}$.}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-18b4216d44b2364ea39ed4a078a067af_l3.png "Rendered by QuickLaTeX.com")
 is minimized by choosing
is minimized by choosing  .
. , the set of all
, the set of all  , where
, where  is a diagonal matrix reporting
is a diagonal matrix reporting  has the same distribution as
has the same distribution as  . Therefore,
. Therefore,![\[\Var(\omega^\top A \omega) = \Var(\omega^\top \Lambda \omega) = \Var \left( \sum_{i=1}^n \lambda_i \omega_i^2 \right) = \sum_{i=1}^n \lambda_i^2 \Var(\omega_i^2) = 2\sum_{i=1}^n \lambda_i^2 = 2\left\|A\right\|_{\rm F}^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a7416823720bac922fae7cc685892a49_l3.png "Rendered by QuickLaTeX.com")
 . Thus,
. Thus,![\[\Var(\omega^\top A \omega) = \Var(\omega^\top \mathfrak{R}(A) \omega) + \Var(\omega^\top \mathfrak{I}(A) \omega) = 2\left\|\mathfrak{R}(A)\right\|_{\rm F}^2 + 2\left\|\mathfrak{I}(A)\right\|_{\rm F}^2 = 2\left\|A\right\|_{\rm F}^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-527980eb3510f2c015106e6945126d41_l3.png "Rendered by QuickLaTeX.com")
![\[\omega^\top A \omega - \mathbb{E}[\omega^\top A \omega] = \sum_{i,j=1}^n A_{ij} \omega_i\omega_j - \sum_{i=1}^n A_{ii} = \sum_{i\ne j} A_{ij} \omega_i\omega_j + \sum_{i=1}^n A_{ii}(\omega_i^2-1).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4489cc9cb97ee7a0896bc61193d79910_l3.png "Rendered by QuickLaTeX.com")
 for every
for every  can be replaced by two times the sum over
can be replaced by two times the sum over  :
:![\[\omega^\top A \omega - \mathbb{E}[\omega^\top A \omega] = 2\sum_{i< j} A_{ij} \omega_i\omega_j.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-afc5f6bb40cd00b7897f25d73751f4ca_l3.png "Rendered by QuickLaTeX.com")
 are
are ![\[\Var(a_1 X_1+\cdots+a_kX_k) = |a_1|^2 \Var(X_1) + \cdots + |a_k|^2 \Var(X_k)\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b6fd81d15f564f514f79ab4c33d133d8_l3.png "Rendered by QuickLaTeX.com")
 and numbers
and numbers  . Ergo,
. Ergo,![\begin{align*}\Var(\omega^\top A\omega) &= \Var(\omega^\top A \omega - \mathbb{E}[\omega^\top A \omega]) \\&= \Var\left(\sum_{i< j} 2A_{ij} \omega_i\omega_j\right) \\&= \sum_{i<j} 4 |A_{ij}|^2 \Var(\omega_i\omega_j) \\&= \sum_{i<j} 4 |A_{ij}|^2 \\&= 2 \sum_{i\ne j} |A_{ij}|^2.\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-bbb33f378fabd391c28d938420d3a32b_l3.png "Rendered by QuickLaTeX.com")
 is a uniform random sign, which has variance
is a uniform random sign, which has variance  camels, the second son took
camels, the second son took  camels, the third son
camels, the third son  camels and the wise man took his own camel and went away.
camels and the wise man took his own camel and went away. is easy. Fortunately, we already know such a distribution, the Gaussian distribution, for which we already calculated
is easy. Fortunately, we already know such a distribution, the Gaussian distribution, for which we already calculated  .
.![\[g = \sqrt{\frac{a}{n}} \omega,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a93345cf94749f98e715e42bc796501c_l3.png "Rendered by QuickLaTeX.com")
 is the squared length of the Gaussian vector
is the squared length of the Gaussian vector 
 using the
using the ![\[\Var(g^\top A g) = \mathbb{E}[\Var(g^\top A g \mid a)] + \Var(\mathbb{E}[g^\top A g \mid a]).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e4e5ed235fbf5b2e026bcc58bd23becc_l3.png "Rendered by QuickLaTeX.com")
 and
and ![\mathbb{E}[ \cdot \mid a]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6035d77442675ac2f790cfb5417e1072_l3.png "Rendered by QuickLaTeX.com") denote the
denote the  and treating
and treating ![\begin{align*}\Var(g^\top A g) &= \mathbb{E}[\Var(a/n \cdot \omega^\top A \omega \mid a)] + \Var(\mathbb{E}[a/n \cdot \omega^\top A \omega \mid a]) \\&=\mathbb{E}[(a/n)^2\Var(\omega^\top A \omega)] + \Var(a/n \cdot \mathbb{E}[\omega^\top A \omega]) \\&= \frac{1}{n^2} \mathbb{E}[a^2] \cdot \Var(\omega^\top A \omega) + \frac{1}{n^2} \Var(a) |\mathbb{E} [\omega^\top A \omega]|^2.\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-be052caddf1d08941925fa0283784635_l3.png "Rendered by QuickLaTeX.com")
![\mathbb{E}[a^2]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-53042ba72cdd3991b14b5d4508da6564_l3.png "Rendered by QuickLaTeX.com") and
and  are known quantities that
are known quantities that ![\[\mathbb{E}[a^2] = n(n+2), \quad \Var(a) = 2n.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-59ecda0ea21d92e43e3182d5cc5a7217_l3.png "Rendered by QuickLaTeX.com")
![\mathbb{E} [\omega^\top A \omega] = \tr A](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-293908b9583df45d93349435d76b981a_l3.png "Rendered by QuickLaTeX.com") . Plugging these all in, we get
. Plugging these all in, we get![\[2\left\|A\right\|_{\rm F}^2 = \frac{n+2}{n} \Var(\omega^\top A\omega) + \frac{2}{n} |\tr A|^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1c9b70fd4e5bc6ca4006114830d45619_l3.png "Rendered by QuickLaTeX.com")
![\[\Var(\omega^\top A\omega) = \frac{2n}{n+2} \left( \left\|A\right\|_{\rm F}^2 - \frac{1}{n}|\tr A|^2\right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7ab53e5895f9a1f474f5bf99fbec5662_l3.png "Rendered by QuickLaTeX.com")
![\[\Var(\omega^*A \omega) = \Var \left( \sum_{i=1}^n \lambda_i |\omega_i|^2 \right) = \sum_{i=1}^n \Var(|\omega_i|^2) \lambda_i^2 = \sum_{i=1}^n \lambda_i^2 = \left\|A\right\|_{\rm F}^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-68f4685a4cd845b98fc1a8fd1494e00a_l3.png "Rendered by QuickLaTeX.com")
 is a
is a  ) reveals that
) reveals that![\[\Var\left( \omega^* A \omega \right) = \Var \left( \sum_{i<j} 2 \Re(A_{ij} \overline{\omega_i} \omega_j) \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b0e61723c22b056d1aca51694c407e6d_l3.png "Rendered by QuickLaTeX.com")
 are
are ![\[\Var\left( \omega^* A \omega \right) = \Var \left( \sum_{i<j} 2 \Re(A_{ij} \overline{\omega_i} \omega_j) \right) = 4\sum_{i<j} \Var \left( \Re(A_{ij} \overline{\omega_i} \omega_j) \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f2d77eb554a1e1ffbe4370efd8c704fb_l3.png "Rendered by QuickLaTeX.com")
 is uniformly distributed on the complex unit circle, we can assume without loss of generality that
is uniformly distributed on the complex unit circle, we can assume without loss of generality that  . Thus, letting
. Thus, letting  be uniform on the complex unit circle,
be uniform on the complex unit circle,![\[\Var\left( \omega^* A \omega \right) = 4\sum_{i<j} \Var \left( |A_{ij}|\Re(\phi)) \right) = 4\Var\left( \Re(\phi) \right)\sum_{i<j}|A_{ij}|^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-76d2ce84714c4549a86686259bd96847_l3.png "Rendered by QuickLaTeX.com")
![\[1 = \Var(\phi) = \Var(\Re \phi) + \Var(\Im \phi) = 2 \Var(\Re \phi)\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f83462ae4de80311482849de445edd5a_l3.png "Rendered by QuickLaTeX.com")
 . Thus
. Thus![\[\Var\left( \omega^* A \omega \right) = 2 \sum_{i<j}|A_{ij}|^2 = \sum_{i\ne j} |A_{ij}|^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-436eeb79ad0eddde0752f1a398397ad5_l3.png "Rendered by QuickLaTeX.com")
 and
and  denote the real and imaginary parts of a vector or matrix, taken entrywise. The key insight is that if
denote the real and imaginary parts of a vector or matrix, taken entrywise. The key insight is that if ![\[\mathscr{R}(\omega) := \twobyone{\mathfrak{R}(\omega)}{\mathfrak{I}(\omega)}\in\real^{2n} \quad \text{is a uniform random vector on the real sphere of radius $\sqrt{n}$}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0ff873eff96e863cf02d36e65a5ca1be_l3.png "Rendered by QuickLaTeX.com")
 .
. . To do this, recall that one way of representing complex numbers is by
. To do this, recall that one way of representing complex numbers is by  matrices:
matrices:![\[a + bi \iff \twobytwo{a}{-b}{b}{a}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-21b802836b33431568e5d854455d87d1_l3.png "Rendered by QuickLaTeX.com")
![\[\mathscr{R}(A) = \twobytwo{\mathfrak{R}(A)}{-\mathfrak{I}(A)}{\mathfrak{I}(A)}{\mathfrak{R}(A)}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-12a37c4298c9e2d49dfa2f3ac32fe573_l3.png "Rendered by QuickLaTeX.com")
![\[\mathscr{R}(A + B) = \mathscr{R}(A) + \mathscr{R}(B), \quad \mathscr{R}(A\cdot B) = \mathscr{R}(A) \cdot \mathscr{R}(B)\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4e7fe7da4edb58f1ee1bb8a2b1d2a78b_l3.png "Rendered by QuickLaTeX.com")
 . A short calculation reveals
. A short calculation reveals![\[\omega^*A\omega = \mathscr{R}(\omega)^\top \mathscr{R}(A)\mathscr{R}(\omega) .\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-d92927d567b8907621af83ab283672a5_l3.png "Rendered by QuickLaTeX.com")
 is a uniform random vector on the sphere of radius
is a uniform random vector on the sphere of radius  . Thus, by the variance formula for the real sphere, we get
. Thus, by the variance formula for the real sphere, we get![\[\Var(\omega^*A\omega) = \Var[(\sqrt{2}\mathscr{R}(\omega))^\top (\mathscr{R}(A)/2)(\sqrt{2}\mathscr{R}(\omega) )] = \frac{4n}{2n+2} \left[ \|\mathscr{R}(A)/2\|_{\rm F}^2 - \frac{1}{8n}(\tr\mathscr{R}(A))^2 \right].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-ff16ba8dd015218ea642633d77f2a37a_l3.png "Rendered by QuickLaTeX.com")
 and
and  . Plugging this in, we obtain
. Plugging this in, we obtain![\[\Var(\omega^*A\omega)= \frac{n}{n+1} \left[ \|A\|_{\rm F}^2 - \frac{1}{n}(\tr A)^2 \right].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c9186eb813af3cd67173d73e32885a22_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E} [(\omega^*A \omega)^2].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8e3e10402f389b06dcd42db97c5ed116_l3.png "Rendered by QuickLaTeX.com")
 . For those unfamiliar with the tensor product, the main properties we will be using
. For those unfamiliar with the tensor product, the main properties we will be using ![\[(A\otimes B) (C\otimes D) = (AB) \otimes (CD), \quad \tr(A\otimes B) = \tr A \cdot \tr B. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c5ea1a0235766ad15b67d02b47cfea2e_l3.png "Rendered by QuickLaTeX.com")
![\[\omega^* A \omega = \tr (\omega^*A\omega) = \tr (A \omega\omega^*).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-578bb521ecfb65fc4025f13431673b08_l3.png "Rendered by QuickLaTeX.com")
![\[(\omega^*A\omega)^2 = (\tr [A \omega\omega^*])^2 = \tr [A\omega\omega^* \otimes A\omega\omega^*] = \tr [(A\otimes A) (\omega\omega^* \otimes \omega\omega^*)].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5161bc0d787be08130c4cfaed0c84489_l3.png "Rendered by QuickLaTeX.com")
![\mathbb{E}[(\omega^*A\omega)^2]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-98fe9a5e8220c22709c9d6ade6c3141b_l3.png "Rendered by QuickLaTeX.com") , it will be sufficient to evaluate
, it will be sufficient to evaluate ![\mathbb{E}[\omega\omega^* \otimes \omega\omega^*]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-06ac3d64041068176a86563cec4c67ba_l3.png "Rendered by QuickLaTeX.com") . Forunately, there is a useful formula for these expectation provided by a field of mathematics known as representation theory (see Lemma 1 in
. Forunately, there is a useful formula for these expectation provided by a field of mathematics known as representation theory (see Lemma 1 in ![\[\mathbb{E}[ \omega\omega^* \otimes \omega\omega^*] = \frac{2n}{n+1} \operatorname{Proj}_{\operatorname{Sym}^2(\complex^n)}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e5eddca3275c6bbb82fa6b789efe7664_l3.png "Rendered by QuickLaTeX.com")
 is the
is the  . Therefore, we have that
. Therefore, we have that![\[\mathbb{E}[(\omega^*A\omega)^2] = \tr [(A\otimes A) \mathbb{E}(\omega\omega^* \otimes \omega\omega^*)] = \frac{2n}{n+1} \tr [(A\otimes A) \operatorname{Proj}_{\operatorname{Sym}^2(\complex^n)}].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6c4f09e537808effd6c51c0aa4d20f6e_l3.png "Rendered by QuickLaTeX.com")
![\[\tr \left[(A\otimes B) \operatorname{Proj}_{\operatorname{Sym}^2(\complex^n)}\right] = \frac{1}{2} \left( \tr(AB) + \tr A \cdot \tr B \right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3ea7660d7e72964cf11ef2239731a497_l3.png "Rendered by QuickLaTeX.com")
![\begin{align*}\Var(\omega^* A \omega) &= \mathbb{E}[(\omega^*A\omega)^2] - (\mathbb{E}[\omega^*A\omega])^2 \\&= \frac{2n}{n+1}\tr [(A\otimes A) \operatorname{Proj}_{\operatorname{Sym}^2(\complex^n)}] - (\tr A)^2 \\&= \frac{n}{n+1}\left[ \tr A^2 + (\tr A)^2 \right] - (\tr A)^2 \\&= \frac{n}{n+1}\left[ \left\|A\right\|_{\rm F}^2 - \frac{1}{n} (\tr A)^2 \right].\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7af313e9e07f20b93b0de83867f20a04_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E}[\omega\omega^\top] = I\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-232c1e956304b14a7a6f4b55f9ba35e3_l3.png "Rendered by QuickLaTeX.com")
![\mathbb{E}[\omega_i\omega_j] = \delta_{ij}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-9986528214c0653217367aca2a90d568_l3.png "Rendered by QuickLaTeX.com") , where
, where ![\begin{align*}\mathbb{E}[ (\omega^*A \omega)^2] &= \mathbb{E}\left[ \left( \sum_{i=1}^n A_{ii} \omega_i^2 +2 \sum_{i<j} A_{ij}\omega_i\omega_j) \right)^2\right] \\&= \sum_{i=1}^n A_{ii}^2 \mathbb{E}[\omega_i^4] + \sum_{i<j} (2A_{ii}A_{jj}+4A_{ij}^2) \mathbb{E}[\omega_i^2]\mathbb{E}[\omega_j^2] \\&= \sum_{i=1}^n A_{ii}^2 \mathbb{E}[\omega_i^4] + \sum_{i<j} (2A_{ii}A_{jj}+4A_{ij}^2) .\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4115914a6e648438e66028437f38ef2a_l3.png "Rendered by QuickLaTeX.com")
![\[\Var(\omega^*A\omega) = \mathbb{E}[ (\omega^*A \omega)^2] - (\mathbb{E}[\omega^* A \omega])^2 = \sum_{i=1}^n A_{ii}^2 (\mathbb{E}[|\omega_i|^4]-1) + 4\sum_{i<j} A_{ij}^2.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-006e2eb8d5f2162654d8c2de39f5a8bc_l3.png "Rendered by QuickLaTeX.com")
 as small as possible. Since
as small as possible. Since  , the smallest possible value for
, the smallest possible value for  , which is obtained by populating
, which is obtained by populating ![\[\omega = a \cdot s \quad \text{for} \quad a \in [0,+\infty), \: s \in\{x\in \field^n : x^*x = n \}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-11867b7bff40d97d79a74d5136774fd9_l3.png "Rendered by QuickLaTeX.com")
![\[\sup_{A\in\mathscr{A}} \Var(\tilde{\omega}^*A\tilde{\omega}) \le \sup_{A\in\mathscr{A}} \Var(\omega^*A\omega \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e54c170954072838232ab5ff7c78cf25_l3.png "Rendered by QuickLaTeX.com")
![\[\tilde{\omega} = a\cdot t \quad \text{and}\quad t\sim \text{Uniform} \{ x \in \field^n :x^*x = n \} \quad \text{is independent of $a$}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-cb668b2c9f168bca81deb51a17726b1d_l3.png "Rendered by QuickLaTeX.com")
 for a uniformly random
for a uniformly random ![\begin{align*}\sup_{A\in\mathscr{A}} \Var(\tilde{\omega}^*A\tilde{\omega})&= \sup_{A\in\mathscr{A}} \left[\mathbb{E}[(\tilde{\omega}^*A\tilde{\omega})^2] - (\tr A)^2\right]\\&= \sup_{A\in\mathscr{A}} \left[\mathbb{E}[a^2 \cdot s^*(Q^*AQ)s] - (\tr (Q^*AQ))^2\right].\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-83564c7ba654655b42890c8adb65636f_l3.png "Rendered by QuickLaTeX.com")
![\begin{align*}\sup_{A\in\mathscr{A}} \Var(\tilde{\omega}^*A\tilde{\omega})&= \sup_{A\in\mathscr{A}} \left[\mathbb{E}[a^2 \cdot s^*(Q^*AQ)s] - (\tr (Q^*AQ))^2\right] \\&\le \mathbb{E}_Q \sup_{A\in\mathscr{A}} \left[\mathbb{E}_{a,s}[a^2 \cdot s^*(Q^*AQ)s] - (\tr (Q^*AQ))^2\right].\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f182f68bcb3cbe40c8b44cf5b585e474_l3.png "Rendered by QuickLaTeX.com")
 for
for  is the same as the supremum of
is the same as the supremum of ![\begin{align*}\sup_{A\in\mathscr{A}} \Var(\tilde{\omega}^*A\tilde{\omega})&\le \mathbb{E}_Q \sup_{A\in\mathscr{A}} \left[\mathbb{E}_{a,s}[a^2 \cdot s^*(Q^*AQ)s] - (\tr (Q^*AQ))^2\right] \\&= \mathbb{E}_Q \sup_{A\in\mathscr{A}} \left[\mathbb{E}_{a,s}[a^2 \cdot s^*As] - (\tr A)^2\right] \\&= \sup_{A\in\mathscr{A}} \Var(\omega^*A\omega).\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-bd5736cb133d33ed28ab0f2305ac9678_l3.png "Rendered by QuickLaTeX.com")
![\[\sup_{A\in\mathscr{A}} \Var(t^*At) \le \sup_{A\in\mathscr{A}} \Var(\tilde{\omega}^*A\tilde{\omega}), \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0de32ccbfe09388b9d36757b7f140a8e_l3.png "Rendered by QuickLaTeX.com")
![\begin{align*}\Var(\tilde{\omega}^*A\tilde{\omega})&= \Var(a^2\cdot t^*At) \\&= \mathbb{E}[\Var(a^2\cdot t^* A t \mid a)] + \Var(\mathbb{E}[a^2\cdot t^* A t \mid a]) \\&= \mathbb{E}[a^4]\Var(t^* A t )+ (\tr A)^2\Var(a^2) \\&\ge \mathbb{E}[a^4]\Var(t^* A t ).\end{align*}](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c74465c627f5e70f943ce415fbfafd22_l3.png "Rendered by QuickLaTeX.com")
![\mathbb{E}[t^*At] = \tr A](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6ee9ad07ec8316cc6003116e3c311189_l3.png "Rendered by QuickLaTeX.com") . By definition,
. By definition, ![\[\mathbb{E}[a^2] = \frac{1}{n}\mathbb{E}[\omega^*\omega] = \frac{1}{n} \mathbb{E}[\tr (\omega\omega^*)] = \frac{1}{n} \tr (\mathbb{E}[\omega\omega^*]) = \frac{\tr I}{n} = 1.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4da8a9a33ffb6559da8625435549f7c2_l3.png "Rendered by QuickLaTeX.com")
![\[\mathbb{E}[a^4] = \mathbb{E}[(a^2)^2] \ge (\mathbb{E}[a^2])^2 = 1.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-356fd56d5d04dbda45fa992ae083be0f_l3.png "Rendered by QuickLaTeX.com")
![\[\Var(\tilde{\omega}^*A\tilde{\omega}) \ge \mathbb{E}[a^4]\Var(t^* A t ) \ge \Var(t^*At) \quad \text{for every }A,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-fc9331e3508e9102014ecc83f4517cc5_l3.png "Rendered by QuickLaTeX.com")
 :
:
 .
. :
:
 on the interval
on the interval ![[-\pi,\pi]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-db4571552bede65e472ffbfee6887855_l3.png "Rendered by QuickLaTeX.com") to visually near-perfect accuracy by connecting the dots between seven points
to visually near-perfect accuracy by connecting the dots between seven points  :
:
 on the interval
on the interval ![[-1,1]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-634fe4705a526f221e312cffd3ceda93_l3.png "Rendered by QuickLaTeX.com") :
: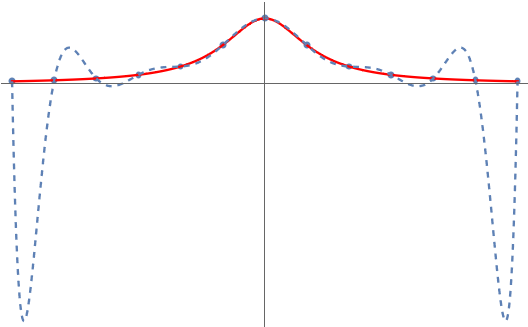
 is terrible! What’s going on? Why doesn’t polynomial interpolation work here? Can we fix it? The answer to the last question is yes and the solution is Chebyshev polynomials.
is terrible! What’s going on? Why doesn’t polynomial interpolation work here? Can we fix it? The answer to the last question is yes and the solution is Chebyshev polynomials.

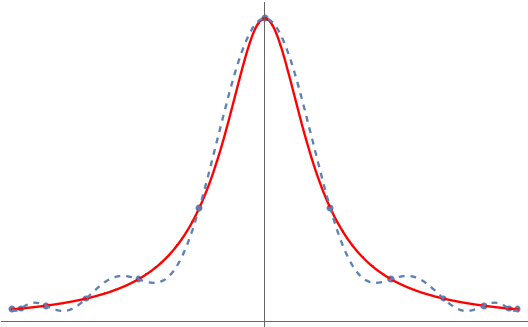
 , like this for ourselves. We’ll assume the interpolation points are given by a function
, like this for ourselves. We’ll assume the interpolation points are given by a function  so we can form the polynomial interpolant for any desired polynomial degree
so we can form the polynomial interpolant for any desired polynomial degree  being \textit{injective} so that the points
being \textit{injective} so that the points  are guaranteed to be distinct.
are guaranteed to be distinct. , the points look like this:
, the points look like this: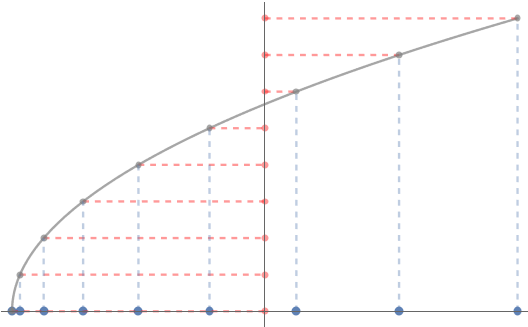

 (shown on horizontal axis)
(shown on horizontal axis) .
.
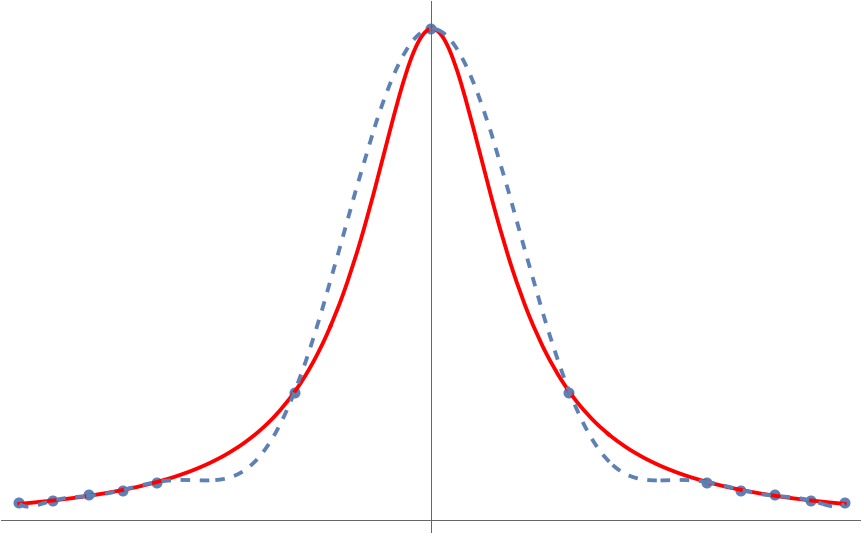
 , we see that these interpolation points now lead to a failure to approximate the function at the middle of the interval, even if we use a lot of interpolation points!
, we see that these interpolation points now lead to a failure to approximate the function at the middle of the interval, even if we use a lot of interpolation points!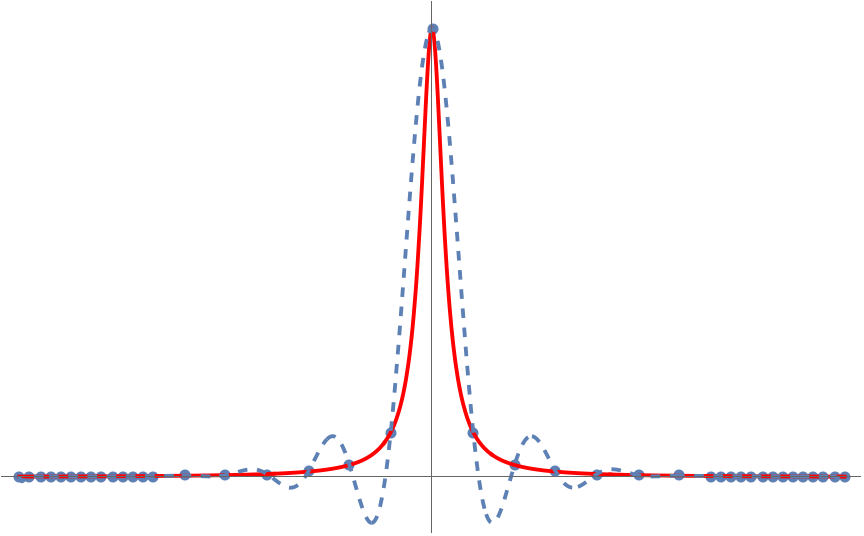
 and
and  are, the more clustered the points will be. For instance,
are, the more clustered the points will be. For instance,


 , and
, and ,
,  .
. . This function yields points which are more clustered at the endpoints:
. This function yields points which are more clustered at the endpoints:


 which not too rough (i.e.,
which not too rough (i.e.,  .
. gives the
gives the  radians along the unit circle. This means that the Chebyshev points are the
radians along the unit circle. This means that the Chebyshev points are the  ).
).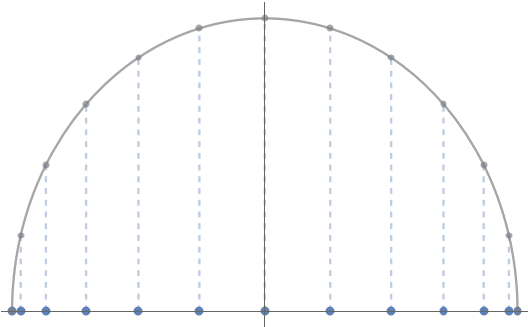
 look like as a function of the angle
look like as a function of the angle  to
to 
 , is a polynomial in the variable
, is a polynomial in the variable 
 always take the form
always take the form

 units of frequency
units of frequency  units of frequency
units of frequency  units of frequency
units of frequency  with exponentially small errors in the number of interpolation points used. By contrast, functions with kinks like
with exponentially small errors in the number of interpolation points used. By contrast, functions with kinks like  are approximated with errors which decay much more slowly. See
are approximated with errors which decay much more slowly. See 
 is
is  since multiple
since multiple  , between which the cosine function is
, between which the cosine function is 
 , we’ve instead written
, we’ve instead written 
 are known as the
are known as the  are known as the Chebyshev polynomials
are known as the Chebyshev polynomials 

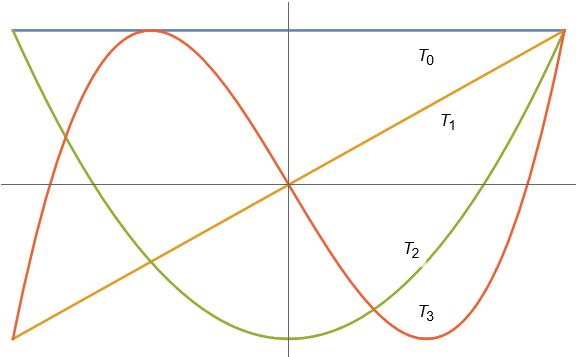
 for
for 
 and
and  are both polynomials, every Chebyshev polynomial is as well.
are both polynomials, every Chebyshev polynomial is as well.![\[p^\circ(\theta) = b_n\cos(n\theta) + \cdots + b_1\cos\theta + b_0\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1c6828300bbae5fa0051e7c134da1d61_l3.png "Rendered by QuickLaTeX.com")
![\[p(x) = b_nT_n(x) + \cdots + b_1 T_1(x) + b_0.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-cb291d9f73ebc4e74d0455dac4558a48_l3.png "Rendered by QuickLaTeX.com")
 are orthogonal to each other; are the Chebyshev polynomials?
are orthogonal to each other; are the Chebyshev polynomials? matrix
matrix  . That is, we seek to
. That is, we seek to 
 of
of  of
of  , our model predicts the output
, our model predicts the output  is approximately
is approximately  . The vector
. The vector  is as small as it could possibly be for all choices of coefficient vectors
is as small as it could possibly be for all choices of coefficient vectors 
 . We assume that
. We assume that  and solve (2) using a linear solver like
and solve (2) using a linear solver like  on a computer using a well-designed piece of software, one obtains an approximate solution
on a computer using a well-designed piece of software, one obtains an approximate solution  is. The “niceness” of a matrix
is. The “niceness” of a matrix  .
. of the largest and smallest
of the largest and smallest 
 corresponds to the fact we have roughly 16 decimal digits of accuracy in double precision floating point arithmetic. Thus, if the condition number of
corresponds to the fact we have roughly 16 decimal digits of accuracy in double precision floating point arithmetic. Thus, if the condition number of  digits of accuracy in our computed solution.
digits of accuracy in our computed solution. . We would hope that we can solve the least squares problem with an accuracy like the rule-of-thumb error bound (3) we had for linear systems of equations, namely a bound like
. We would hope that we can solve the least squares problem with an accuracy like the rule-of-thumb error bound (3) we had for linear systems of equations, namely a bound like  . But this is not the kind of accuracy we get for the least squares problem when we solve it using the normal equations. Instead, we get accuracy like
. But this is not the kind of accuracy we get for the least squares problem when we solve it using the normal equations. Instead, we get accuracy like
 , then the normal equations give us absolute nonsense for
, then the normal equations give us absolute nonsense for  times larger than
times larger than  . So even if we solve the least squares problem with QR factorization, we still get a squared condition number in our error bound, but this condition number squared is multiplied by the residual
. So even if we solve the least squares problem with QR factorization, we still get a squared condition number in our error bound, but this condition number squared is multiplied by the residual  , which is small if the least squares fit is good. The least squares solution is usually only interesting when the residual is small, thus justifying dropping it in the rule of thumb.
, which is small if the least squares fit is good. The least squares solution is usually only interesting when the residual is small, thus justifying dropping it in the rule of thumb.
 , etc.
, etc. denote the temperature of the material at point
denote the temperature of the material at point  . Laplace’s equation states that, at any point
. Laplace’s equation states that, at any point 

 .
. on the boundary to produce the electric potential
on the boundary to produce the electric potential  its boundary. Denote points
its boundary. Denote points  , with the length of
, with the length of  denoted
denoted  . The double layer potential satisfies
. The double layer potential satisfies
 denotes the directional derivative taken in the direction normal (perpendicular) to the surface at the point
denotes the directional derivative taken in the direction normal (perpendicular) to the surface at the point  . Note we choose a unit system for
. Note we choose a unit system for  at points
at points 
 centered at
centered at 


 square matrix and
square matrix and  ,
,  in memory and multiplying it with
in memory and multiplying it with  .
. .
. . Specifically, our first equation can be rewritten as
. Specifically, our first equation can be rewritten as




 , we have that
, we have that

 from
from  but, as we did last section, let’s first consider the reverse. To compute
but, as we did last section, let’s first consider the reverse. To compute 


 times equation (8) to equation (7). Following last section, we now instead eliminate
times equation (8) to equation (7). Following last section, we now instead eliminate  from equation (8) using equation (7). To do this, we need to integrate equation (7) in order to cancel the integral in equation (8):
from equation (8) using equation (7). To do this, we need to integrate equation (7) in order to cancel the integral in equation (8):
 times this integrated equation to equation (8) yields
times this integrated equation to equation (8) yields


 using the
using the 
 for the
for the  for the normal vector to
for the normal vector to  for the
for the  for the
for the  is a so-called
is a so-called  . Therefore, (9) simplifies to
. Therefore, (9) simplifies to

 for points
for points 
 ,
,  is a nonzero constant. Such an integral equation is said to be of the
is a nonzero constant. Such an integral equation is said to be of the  ,
,  ,
,  , and
, and  . We say the kernel
. We say the kernel 
 .
. and
and  .
. ):
):
 denote the identity operator on functions: It takes as inputs function
denote the identity operator on functions: It takes as inputs function  denote the “integration against
denote the “integration against  .
.


 system of linear equations. One can use this as a numerical method to solve second-kind integral equations: First, we
system of linear equations. One can use this as a numerical method to solve second-kind integral equations: First, we  by a separable kernel of a modest rank
by a separable kernel of a modest rank  -decompositions, sparse component analysis, and the blind separation of sums of exponentials
-decompositions, sparse component analysis, and the blind separation of sums of exponentials![\[f(t) = a_0 \cos(\omega_0 t - \phi_0) + a_1 \cos(\omega_1 t - \phi_1) + a_2 \cos(\omega_2 t - \phi_2). \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-20caba029479063b3c7d59617eff2225_l3.png "Rendered by QuickLaTeX.com")
 ,
,  , and
, and  .
. which we assume are equally spaced
which we assume are equally spaced![\[t_j = j\Delta t \quad \textnormal{for} \quad j = 0,1,2,\ldots,n-1.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4ad3ecc9f18da4793ab2a0113f4afae8_l3.png "Rendered by QuickLaTeX.com")
![\[f_j = f(t_j) \quad \textnormal{for} \quad j = 0,1,2,\ldots,n-1\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-2945d5d9092cf48b8b7503194ef8d8e0_l3.png "Rendered by QuickLaTeX.com")
 , where
, where  it will be helpful to rewrite our formula (1) for
it will be helpful to rewrite our formula (1) for ![\[\cos \alpha = \frac{\mathrm{e}^{\mathrm{i} \alpha}+\mathrm{e}^{-\mathrm{i} \alpha}}{2}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1004ce391e777282f5b1cac7ea69b7b6_l3.png "Rendered by QuickLaTeX.com")
![\[a_0 \cos(\omega_0 t - \phi_0) = d_0 \mathrm{e}^{\mathrm{i} \omega_0t} + d_1 \mathrm{e}^{-\mathrm{i} \omega_0t}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b477beb50968f3d0ef261aeafaef89f1_l3.png "Rendered by QuickLaTeX.com")
 and
and  are complex coefficients
are complex coefficients  and
and  which contain the same information as the original parameters
which contain the same information as the original parameters  and
and  . Now notice that we are only interest in values
. Now notice that we are only interest in values  which are multiples of the spacing
which are multiples of the spacing  . Thus, our frequency component can be further rewritten as
. Thus, our frequency component can be further rewritten as![\[a_0 \cos(\omega_0 t_j - \phi_0) = d_0 z_0^j + d_1 z_1^j\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f3728deaec66b4719f2d79377295a1a0_l3.png "Rendered by QuickLaTeX.com")
 and
and  . Performing these reductions, our samples
. Performing these reductions, our samples  take the form
take the form![\[f_j = d_0 z_0^j + d_1 z_1^j + \cdots + d_5 z_5^j. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-80d74d6613b6c1dd28e8e39741fe2043_l3.png "Rendered by QuickLaTeX.com")
 and
and  in the relation (2) from a small number of measurements
in the relation (2) from a small number of measurements  . This can reveal patterns in the sequence which are less obvious when it is represented as given just as numbers. For instance, any seven columns of
. This can reveal patterns in the sequence which are less obvious when it is represented as given just as numbers. For instance, any seven columns of  which can be much larger than seven. In addition, as we will soon effectively exploit later, vectors in the nullspace of
which can be much larger than seven. In addition, as we will soon effectively exploit later, vectors in the nullspace of ![\[H = \begin{bmatrix} f_0 & f_1 & f_2 & \cdots & f_{(n-1)/2} \\f_1 & f_2 & f_3 & \cdots & f_{(n-1)/2+1} \\f_2 & f_3 & f_4 & \cdots & f_{(n-1)/2+2} \\\vdots & \vdots & \vdots & \ddots & \vdots \\f_{(n-1)/2} & f{(n-1)/2+1} & f{(n-1)/2+2} & \cdots & f_{n-1} \end{bmatrix}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-e58f400c13a096efb5c1682c52003056_l3.png "Rendered by QuickLaTeX.com")
 . Observe that the entry in position
. Observe that the entry in position  ,
,  . (We use a
. (We use a  using (2):
using (2):![\[H_{ij} = f_{i+j} = \sum_{k=0}^5 d_k z_k^{i+j} = \sum_{k=0}^5 d_k z_k^i \cdot z_k^j. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c66cda6c8df0e635353009a6469c9d13_l3.png "Rendered by QuickLaTeX.com")
 was just begging to be factorized as
was just begging to be factorized as  , which we did. Equation (4) almost looks like the formula for the product of two matrices with entries
, which we did. Equation (4) almost looks like the formula for the product of two matrices with entries  , so it makes sense to introduce the
, so it makes sense to introduce the  matrix
matrix  with entry
with entry  . This is a so-called
. This is a so-called ![\[V = \begin{bmatrix}z_0^0 & z_0^1 & z_0^2 & \cdots & z_0^{(n-1)/2} \\z_1^0 & z_1^1 & z_1^2 & \cdots & z_1^{(n-1)/2} \\\vdots & \vdots & \vdots & \ddots & \vdots \\z_5^0 & z_5^1 & z_5^2 & \cdots & z_5^{(n-1)/2}\end{bmatrix}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-52248d150045d64416cf49a569abf156_l3.png "Rendered by QuickLaTeX.com")
 diagonal matrix
diagonal matrix  , the formula (4) for
, the formula (4) for  , the factor
, the factor ![\[H = V^\top D V. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-37a707b3000f4e0e2be34695da3f0f68_l3.png "Rendered by QuickLaTeX.com")
 describing our sampled recording
describing our sampled recording  , determining all the frequencies would be very straightforward.
, determining all the frequencies would be very straightforward. of
of ![\[f_m = c_{k-1} f_{m-1} + \cdots + c_1f_{m-k+1}+ c_0 f_{m-k} \quad \textnormal{for every} \quad m = k,\,{k+1},\,{k+2},\cdots. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f01bd866e8c2df02dc870f3a78958c17_l3.png "Rendered by QuickLaTeX.com")
 because there are six terms in the formula (2) for
because there are six terms in the formula (2) for  , such a recurrence will allow us to determine the parameters
, such a recurrence will allow us to determine the parameters  . A very good rule of thumb in applied mathematics is to always write down linear equations in matrix–vector notation in see how it looks. Doing this, we obtain
. A very good rule of thumb in applied mathematics is to always write down linear equations in matrix–vector notation in see how it looks. Doing this, we obtain![\[\begin{bmatrix} f_6 \\ f_7 \\ \vdots \\ f_{n-1} \end{bmatrix} = \underbrace{\begin{bmatrix} f_0 & f_1 & f_2 & f_3 & f_4 & f_5 \\ f_1 & f_2 & f_3 & f_4 & f_5 & f_6 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ f_{n-7} & f_{n-6} & f_{n-5} & f_{n-4} & f_{n-3} & f_{n-2} \end{bmatrix}}_{=F}\begin{bmatrix} c_0 \\ c_1 \\ \vdots \\ c_5 \end{bmatrix}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7d7dc3e345c47a62fa233007d8d0db69_l3.png "Rendered by QuickLaTeX.com")
 going forward.
going forward. would also be fine for our purposes, but we assume
would also be fine for our purposes, but we assume ![\[f_{6 \, :\, n-1} = F c, \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b8b53d6de5c09e51040ae688d9bc7d67_l3.png "Rendered by QuickLaTeX.com")
 for the vector on the left-hand side of (7) and collected the recurrence coefficients
for the vector on the left-hand side of (7) and collected the recurrence coefficients  ), the system equations (8) has more equations than unknowns. Fortunately, we are not in the typical case. Despite the fact that we have more equations than unknowns, the linear equations (8) have a unique solution
), the system equations (8) has more equations than unknowns. Fortunately, we are not in the typical case. Despite the fact that we have more equations than unknowns, the linear equations (8) have a unique solution  In particular, the matrix on the right-hand side of this equation is guaranteed to be nonsingular under our assumptions. Using the Vandermonde decomposition, can you see why?
In particular, the matrix on the right-hand side of this equation is guaranteed to be nonsingular under our assumptions. Using the Vandermonde decomposition, can you see why? ; we seek to find all complex numbers
; we seek to find all complex numbers  gives
gives![\[z^6 = c_0 z^5 + c_1 z^4 + \cdots + c_6. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4fb9f7123e927dbb902df1eef680ef98_l3.png "Rendered by QuickLaTeX.com")
![\[\begin{bmatrix}f_0 \\ f_1 \\ \vdots \\ f_{n-1}\end{bmatrix} = \begin{bmatrix}1 & 1 & \cdots & 1 \\ z_0 & z_1 & \cdots & z_5 \\ \vdots & \vdots & \ddots & \vdots \\ z_0^{n-1} & z_1^{n-1} & \cdots & z_5^{n-1}\end{bmatrix} \begin{bmatrix}d_0 \\ d_1 \\ \vdots \\ d_{n-1}.\end{bmatrix}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4b18fe5a64350989e4534f4b08ef4c23_l3.png "Rendered by QuickLaTeX.com")
 . So far, the benefits of the matrix factorization perspective have yet to really reveal themselves.
. So far, the benefits of the matrix factorization perspective have yet to really reveal themselves. needed to describe the samples and the representation of the samples as a mixture of exponentials is uniquely determined only if the matrix
needed to describe the samples and the representation of the samples as a mixture of exponentials is uniquely determined only if the matrix  ,
,  , and
, and  . (Here, the superscript denotes an index rather than differentiation.) Each signal is a weighted mixture of three sources
. (Here, the superscript denotes an index rather than differentiation.) Each signal is a weighted mixture of three sources  ,
,  , and
, and  , each of which plays a musical chord of three notes (thus representable as a sum of cosines as in (1)). One can think of the sources of being produced three different musical instruments at different places in a room and the recordings
, each of which plays a musical chord of three notes (thus representable as a sum of cosines as in (1)). One can think of the sources of being produced three different musical instruments at different places in a room and the recordings  for each recording
for each recording  and form each collection of samples into a Hankel matrix
and form each collection of samples into a Hankel matrix![\[H^{(\ell)} = \begin{bmatrix} f_0^{(\ell)} & f_1^{(\ell)} & f_2^{(\ell)} & \cdots & f_{(n-1)/2}^{(\ell)} \\f_1^{(\ell)} & f_2^{(\ell)} & f_3^{(\ell)} & \cdots & f_{(n-1)/2+1}^{(\ell)} \\f_2^{(\ell)} & f_3^{(\ell)} & f_4^{(\ell)} & \cdots & f_{(n-1)/2+2}^{(\ell)} \\\vdots & \vdots & \vdots & \ddots & \vdots \\f_{(n-1)/2}^{(\ell)} & f_{(n-1)/2+1}^{(\ell)} & f_{(n-1)/2+2}^{(\ell)} & \cdots & f_{n-1}^{(\ell)} \end{bmatrix}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-426cddcdbfa1b1bae2c3aaccd49f9974_l3.png "Rendered by QuickLaTeX.com")
 ,
,  , and
, and  as slices of a
as slices of a  array given by
array given by![\[\mathcal{H}(:,:,\ell) = H^{(\ell)} \quad \textnormal{for} \quad \ell=1,2,3.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b8b73fa4217e9c667877693a2f3e8348_l3.png "Rendered by QuickLaTeX.com")
![\[H = V^\top DV = \tilde{V}^\top \tilde{D} \tilde{V}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-961c06b840f52d60a6fbc789026074a1_l3.png "Rendered by QuickLaTeX.com")
 can be uniquely determined from the measurements
can be uniquely determined from the measurements  rows,
rows,  and perhaps
and perhaps  ,
,  , etc.
, etc. This matrix has rank-two but no rank-two confluent Vandermonde decomposition. The issue is that when extended to an infinite Hankel matrix
This matrix has rank-two but no rank-two confluent Vandermonde decomposition. The issue is that when extended to an infinite Hankel matrix  this (infinite!) matrix has a rank exceeding the size of the original Hankel matrix
this (infinite!) matrix has a rank exceeding the size of the original Hankel matrix  into a Hankel matrix, it can also be useful to form them into a
into a Hankel matrix, it can also be useful to form them into a ![\[T = \begin{bmatrix} f_{(n-1)/2} & f_{(n-1)/2+1} & f_{(n-1)/2+2} & \cdots & f_{n-1} \\\\f_{(n-1)/2-1} & f_{(n-1)/2} & f_{(n-1)/2+1} & \cdots & f_{n-2} \\\\f_{(n-1)/2-2} & f_{(n-1)/2-1} & f_{(n-1)/2} & \cdots & f_{n-3} \\\\\vdots & \vdots & \vdots & \ddots & \vdots \\\\ f_0 & f_1 & f_2 & \cdots & f_{(n-1)/2} \end{bmatrix}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-d576130eb33a8d98958a967ae78ae988_l3.png "Rendered by QuickLaTeX.com")
 has the appealing propery that the matrix–vector product
has the appealing propery that the matrix–vector product  computes a
computes a ![\[T = \operatorname{ReversedRows}(V^\top) \cdot DV.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6cde21a8060919d23383e6cb5fcbaebe_l3.png "Rendered by QuickLaTeX.com")
![\[T = V^* D V,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-ef01b1f93fbb19fa844a5e40b1c8ceb7_l3.png "Rendered by QuickLaTeX.com")
 which are
which are  where
where  .
.