I’m excited to share that my paper, Fast and forward stable randomized algorithms for linear least-squares problems has been released as a preprint on arXiv.
With the release of this paper, now seemed like a great time to discuss a topic I’ve been wanting to write about for a while: sketching. For the past two decades, sketching has become a widely used algorithmic tool in matrix computations. Despite this long history, questions still seem to be lingering about whether sketching really works:
In this post, I want to take a critical look at the question “does sketching work”? Answering this question requires answering two basic questions:
- What is sketching?
- What would it mean for sketching to work?
I think a large part of the disagreement over the efficacy of sketching boils down to different answers to these questions. By considering different possible answers to these questions, I hope to provide a balanced perspective on the utility of sketching as an algorithmic primitive for solving linear algebra problems.
Sketching
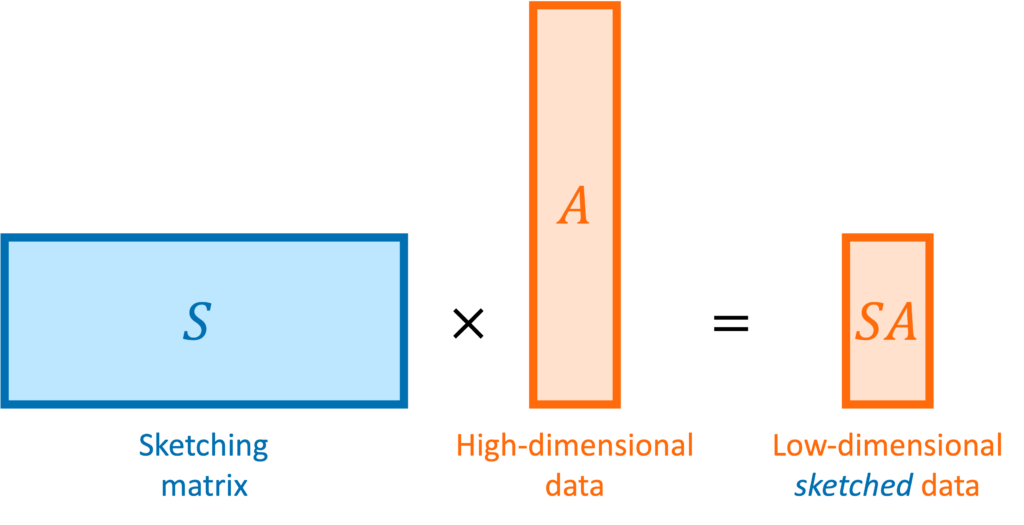
In matrix computations, sketching is really a synonym for (linear) dimensionality reduction. Suppose we are solving a problem involving one or more high-dimensional vectors  or perhaps a tall matrix
or perhaps a tall matrix  . A sketching matrix is a
. A sketching matrix is a  matrix
matrix  where
where  . When multiplied into a high-dimensional vector
. When multiplied into a high-dimensional vector  or tall matrix
or tall matrix  , the sketching matrix
, the sketching matrix  produces compressed or “sketched” versions
produces compressed or “sketched” versions  and
and  that are much smaller than the original vector and matrix .
that are much smaller than the original vector and matrix .
Let  be a collection of vectors. For to be a “good” sketching matrix for
be a collection of vectors. For to be a “good” sketching matrix for  , we require that preserves the lengths of every vector in up to a distortion parameter
, we require that preserves the lengths of every vector in up to a distortion parameter  :
:
(1) ![\[(1-\varepsilon) \norm{x}\le\norm{Sx}\le(1+\varepsilon)\norm{x} \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-735df49a45ff5d0bb27d478569004bdd_l3.png "Rendered by QuickLaTeX.com")
 in .
in .
For linear algebra problems, we often want to sketch a matrix . In this case, the appropriate set that we want our sketch to be “good” for is the column space of the matrix , defined to be
![\[\operatorname{col}(A) \coloneqq \{ Ax : x \in \real^k \}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5ecde6b43df29caba14fd43682b4cc86_l3.png "Rendered by QuickLaTeX.com")
 for
for  with an output dimension of roughly
with an output dimension of roughly  . In particular, the sketching dimension
. In particular, the sketching dimension  is proportional to the number of columns
is proportional to the number of columns  of . This is pretty neat! We can design a single sketching matrix which preserves the lengths of all infinitely-many vectors
of . This is pretty neat! We can design a single sketching matrix which preserves the lengths of all infinitely-many vectors  in the column space of .
in the column space of .
Sketching Matrices
There are many types of sketching matrices, each with different benefits and drawbacks. Many sketching matrices are based on randomized constructions in the sense that entries of are chosen to be random numbers. Broadly, sketching matrices can be classified into two types:
- Data-dependent sketches. The sketching matrix is constructed to work for a specific set of input vectors .
- Oblivious sketches. The sketching matrix is designed to work for an arbitrary set of input vectors of a given size (i.e., has
 elements) or dimension ( is a -dimensional linear subspace).
elements) or dimension ( is a -dimensional linear subspace).
We will only discuss oblivious sketching for this post. We will look at three types of sketching matrices: Gaussian embeddings, subsampled randomized trignometric transforms, and sparse sign embeddings.
The details of how these sketching matrices are built and their strengths and weaknesses can be a little bit technical. All three constructions are independent from the rest of this article and can be skipped on a first reading. The main point is that good sketching matrices exist and are fast to apply: Reducing  to
to  requires roughly
requires roughly  operations, rather than the
operations, rather than the  operations we would expect to multiply a matrix and a vector of length
operations we would expect to multiply a matrix and a vector of length  .1Here,
.1Here,  is big O notation.
is big O notation.
Gaussian Embeddings
The simplest type of sketching matrix  is obtained by (independently) setting every entry of to be a Gaussian random number with mean zero and variance
is obtained by (independently) setting every entry of to be a Gaussian random number with mean zero and variance  . Such a sketching matrix is called a Gaussian embedding.2Here, embedding is a synonym for sketching matrix.
. Such a sketching matrix is called a Gaussian embedding.2Here, embedding is a synonym for sketching matrix.
Benefits. Gaussian embeddings are simple to code up, requiring only a standard matrix product to apply to a vector or matrix . Gaussian embeddings admit a clean theoretical analysis, and their mathematical properties are well-understood.
Drawbacks. Computing for a Gaussian embedding costs operations, significantly slower than the other sketching matrices we will consider below. Additionally, generating and storing a Gaussian embedding can be computationally expensive.
Subsampled Randomized Trigonometric Transforms
The subsampled randomized trigonometric transform (SRTT) sketching matrix takes a more complicated form. The sketching matrix is defined to be a scaled product of three matrices
![\[S = \sqrt{\frac{n}{d}} \cdot R \cdot F \cdot D.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-92095cbf9c7d55273bd572a33debe415_l3.png "Rendered by QuickLaTeX.com")
These matrices have the following definitions:
 is a diagonal matrix whose entries are each a random
is a diagonal matrix whose entries are each a random  (chosen independently with equal probability).
(chosen independently with equal probability). is a fast trigonometric transform such as a fast discrete cosine transform.3One can also use the ordinary fast Fourier transform, but this results in a complex-valued sketch.
is a fast trigonometric transform such as a fast discrete cosine transform.3One can also use the ordinary fast Fourier transform, but this results in a complex-valued sketch. is a selection matrix. To generate
is a selection matrix. To generate  , let
, let  be a random subset of
be a random subset of  , selected without replacement. is defined to be a matrix for which
, selected without replacement. is defined to be a matrix for which  for every vector .
for every vector .
To store on a computer, it is sufficient to store the diagonal entries of  and the selected coordinates defining . Multiplication of against a vector should be carried out by applying each of the matrices ,
and the selected coordinates defining . Multiplication of against a vector should be carried out by applying each of the matrices ,  , and in sequence, such as in the following MATLAB code:
, and in sequence, such as in the following MATLAB code:
% Generate randomness for S
signs = 2*randi(2,m,1)-3; % diagonal entries of D
idx = randsample(m,d); % indices i_1,...,i_d defining R
% Multiply S against b
c = signs .* b % multiply by D
c = dct(c) % multiply by F
c = c(idx) % multiply by R
c = sqrt(n/d) * c % scaleBenefits. can be applied to a vector in  operations, a significant improvement over the cost of a Gaussian embedding. The SRTT has the lowest memory and random number generation requirements of any of the three sketches we discuss in this post.
operations, a significant improvement over the cost of a Gaussian embedding. The SRTT has the lowest memory and random number generation requirements of any of the three sketches we discuss in this post.
Drawbacks. Applying to a vector requires a good implementation of a fast trigonometric transform. Even with a high-quality trig transform, SRTTs can be significantly slower than sparse sign embeddings (defined below).4For an example, see Figure 2 in this paper. SRTTs are hard to parallelize.5Block SRTTs are more parallelizable, however. In theory, the sketching dimension should be chosen to be  , larger than for a Gaussian sketch.
, larger than for a Gaussian sketch.
Sparse Sign Embeddings
A sparse sign embedding takes the form
![\[S = \frac{1}{\sqrt{\zeta}} \begin{bmatrix} s_1 & s_2 & \cdots & s_n \end{bmatrix}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-bb5806806e2e5900d4351c08befbd82e_l3.png "Rendered by QuickLaTeX.com")
 is an independently generated random vector with exactly
is an independently generated random vector with exactly  nonzero entries with random values in uniformly random positions. The result is a matrix with only
nonzero entries with random values in uniformly random positions. The result is a matrix with only  nonzero entries. The parameter is often set to a small constant like
nonzero entries. The parameter is often set to a small constant like  in practice.6This recommendation comes from the following paper, and I’ve used this parameter setting successfully in my own work.
in practice.6This recommendation comes from the following paper, and I’ve used this parameter setting successfully in my own work.
Benefits. By using a dedicated sparse matrix library, can be very fast to apply to a vector (either  or
or  operations) to apply to a vector, depending on parameter choices (see below). With a good sparse matrix library, sparse sign embeddings are often the fastest sketching matrix by a wide margin.
operations) to apply to a vector, depending on parameter choices (see below). With a good sparse matrix library, sparse sign embeddings are often the fastest sketching matrix by a wide margin.
Drawbacks. To be fast, sparse sign embeddings requires a good sparse matrix library. They require generating and storing roughly  random numbers, higher than SRTTs (roughly numbers) but much less than Gaussian embeddings (
random numbers, higher than SRTTs (roughly numbers) but much less than Gaussian embeddings ( numbers). In theory, the sketching dimension should be chosen to be and the sparsity should be set to
numbers). In theory, the sketching dimension should be chosen to be and the sparsity should be set to  ; the theoretically sanctioned sketching dimension (at least according to existing theory) is larger than for a Gaussian sketch. In practice, we can often get away with using
; the theoretically sanctioned sketching dimension (at least according to existing theory) is larger than for a Gaussian sketch. In practice, we can often get away with using  and
and  .
.
Summary
Using either SRTTs or sparse maps, a sketching a vector of length down to dimensions requires only to operations. To apply a sketch to an entire  matrix thus requires roughly
matrix thus requires roughly  operations. Therefore, sketching offers the promise of speeding up linear algebraic computations involving , which typically take
operations. Therefore, sketching offers the promise of speeding up linear algebraic computations involving , which typically take  operations.
operations.
How Can You Use Sketching?
The simplest way to use sketching is to first apply the sketch to dimensionality-reduce all of your data and then apply a standard algorithm to solve the problem using the reduced data. This approach to using sketching is called sketch-and-solve.
As an example, let’s apply sketch-and-solve to the least-squares problem:
(2) ![\[\operatorname*{minimize}_{x\in\real^k} \norm{Ax - b}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-07528304ce875f54aa1173062c5ec10a_l3.png "Rendered by QuickLaTeX.com")
having many more rows than columns  .
.
To solve this problem with sketch-and-solve, generate a good sketching matrix for the set  . Applying to our data and , we get a dimensionality-reduced least-squares problem
. Applying to our data and , we get a dimensionality-reduced least-squares problem
(3) ![\[\operatorname*{minimize}_{\hat{x}\in\real^k} \norm{(SA)\hat{x} - Sb}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-7110d3e9c1dd7e29793603a5bafdd201_l3.png "Rendered by QuickLaTeX.com")
 is the sketch-and-solve solution to the least-squares problem, which we can use as an approximate solution to the original least-squares problem.
is the sketch-and-solve solution to the least-squares problem, which we can use as an approximate solution to the original least-squares problem.
Least-squares is just one example of the sketch-and-solve paradigm. We can also use sketching to accelerate other algorithms. For instance, we could apply sketch-and-solve to clustering. To cluster data points  , first apply sketching to obtain
, first apply sketching to obtain  and then apply an out-of-the-box clustering algorithms like k-means to the sketched data points.
and then apply an out-of-the-box clustering algorithms like k-means to the sketched data points.
Does Sketching Work?
Most often, when sketching critics say “sketching doesn’t work”, what they mean is “sketch-and-solve doesn’t work”.
To address this question in a more concrete setting, let’s go back to the least-squares problem (2). Let  denote the optimal least-squares solution and let be the sketch-and-solve solution (3). Then, using the distortion condition (1), one can show that
denote the optimal least-squares solution and let be the sketch-and-solve solution (3). Then, using the distortion condition (1), one can show that
![\[\norm{A\hat{x} - b} \le \frac{1+\varepsilon}{1-\varepsilon} \norm{Ax - b}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3d1d034bd8bf93f1c15e435a27a355ee_l3.png "Rendered by QuickLaTeX.com")
 , then this bound tells us that
, then this bound tells us that (4) ![\[\norm{A\hat{x} - b} \le 2\norm{Ax_\star - b}. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-588170743415f491f48ef2adc3d46628_l3.png "Rendered by QuickLaTeX.com")
Is this a good result or a bad result? Ultimately, it depends. In some applications, the quality of a putative least-squares solution is can be assessed from the residual norm  . For such applications, the bound (4) ensures that is at most twice
. For such applications, the bound (4) ensures that is at most twice  . Often, this means is a pretty decent approximate solution to the least-squares problem.
. Often, this means is a pretty decent approximate solution to the least-squares problem.
For other problems, the appropriate measure of accuracy is the so-called forward error  , measuring how close is to . For these cases, it is possible that might be large even though the residuals are comparable (4).
, measuring how close is to . For these cases, it is possible that might be large even though the residuals are comparable (4).
Let’s see an example, using the MATLAB code from my paper:
[A, b, x, r] = random_ls_problem(1e4, 1e2, 1e8, 1e-4); % Random LS problem
S = sparsesign(4e2, 1e4, 8); % Sparse sign embedding
sketch_and_solve = (S*A) \ (S*b); % Sketch-and-solve
direct = A \ b; % MATLAB mldivideHere, we generate a random least-squares problem of size 10,000 by 100 (with condition number  and residual norm
and residual norm  ). Then, we generate a sparse sign embedding of dimension
). Then, we generate a sparse sign embedding of dimension  (corresponding to a distortion of roughly
(corresponding to a distortion of roughly  ). Then, we compute the sketch-and-solve solution and, as reference, a “direct” solution by MATLAB’s \.
). Then, we compute the sketch-and-solve solution and, as reference, a “direct” solution by MATLAB’s \.
We compare the quality of the sketch-and-solve solution to the direct solution, using both the residual and forward error:
fprintf('Residuals: sketch-and-solve %.2e, direct %.2e, optimal %.2e\n',...
norm(b-A*sketch_and_solve), norm(b-A*direct), norm(r))
fprintf('Forward errors: sketch-and-solve %.2e, direct %.2e\n',...
norm(x-sketch_and_solve), norm(x-direct))Here’s the output:
Residuals: sketch-and-solve 1.13e-04, direct 1.00e-04, optimal 1.00e-04
Forward errors: sketch-and-solve 1.06e+03, direct 8.08e-07The sketch-and-solve solution has a residual norm of  , close to direct method’s residual norm of
, close to direct method’s residual norm of  . However, the forward error of sketch-and-solve is
. However, the forward error of sketch-and-solve is  nine orders of magnitude larger than the direct method’s forward error of
nine orders of magnitude larger than the direct method’s forward error of  .
.
Does sketch-and-solve work? Ultimately, it’s a question of what kind of accuracy you need for your application. If a small-enough residual is all that’s needed, then sketch-and-solve is perfectly adequate. If small forward error is needed, sketch-and-solve can be quite bad.
One way sketch-and-solve can be improved is by increasing the sketching dimension and lowering the distortion . Unfortunately, improving the distortion of the sketch is expensive. Because of the relation  , to decrease the distortion by a factor of ten requires increasing the sketching dimension by a factor of one hundred! Thus, sketch-and-solve is really only appropriate when a low degree of distortion is necessary.
, to decrease the distortion by a factor of ten requires increasing the sketching dimension by a factor of one hundred! Thus, sketch-and-solve is really only appropriate when a low degree of distortion is necessary.
Iterative Sketching: Combining Sketching with Iteration
Sketch-and-solve is a fast way to get a low-accuracy solution to a least-squares problem. But it’s not the only way to use sketching for least-squares. One can also use sketching to obtain high-accuracy solutions by combining sketching with an iterative method.
There are many iterative methods for least-square problems. Iterative methods generate a sequence of approximate solutions  that we hope will converge at a rapid rate to the true least-squares solution, .
that we hope will converge at a rapid rate to the true least-squares solution, .
To using sketching to solve least-squares problems iteratively, we can use the following observation:
If
, then
.
Therefore, if we compute a QR factorization
![\[SA = QR,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-9edf84077821e9e0cd0c772b77024799_l3.png "Rendered by QuickLaTeX.com")
![\[A^\top A \approx (SA)^\top (SA) = R^\top Q^\top Q R = R^\top R.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-90e14ee1172525fd795980cb3ef1a647_l3.png "Rendered by QuickLaTeX.com")
 since
since  has orthonormal columns. The conclusion is that
has orthonormal columns. The conclusion is that  .
.
Let’s use the approximation to solve the least-squares problem iteratively. Start off with the normal equations7As I’ve described in a previous post, it’s generally inadvisable to solve least-squares problems using the normal equations. Here, we’re just using the normal equations as a conceptual tool to derive an algorithm for solving the least-squares problem.
(5) ![\[(A^\top A)x = A^\top b. \]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3f3c5265345a169d6633a759854510da_l3.png "Rendered by QuickLaTeX.com")
 by
by  in (5) and solving. The resulting solution is
in (5) and solving. The resulting solution is ![\[x_0 = R^{-1} (R^{-\top}(A^\top b)).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6b63093ea5c1d9714fb0deab43fc4dc3_l3.png "Rendered by QuickLaTeX.com")
This solution  will typically not be a good solution to the least-squares problem (2), so we need to iterate. To do so, we’ll try and solve for the error
will typically not be a good solution to the least-squares problem (2), so we need to iterate. To do so, we’ll try and solve for the error  . To derive an equation for the error, subtract
. To derive an equation for the error, subtract  from both sides of the normal equations (5), yielding
from both sides of the normal equations (5), yielding
![\[(A^\top A)(x-x_0) = A^\top (b-Ax_0).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4f1ee993844dbcd8e397f27ccd1deefb_l3.png "Rendered by QuickLaTeX.com")
for again and solve for , obtaining a new approximate solution  :
: ![\[x\approx x_1 \coloneqq x_0 + R^{-\top}(R^{-1}(A^\top(b-Ax_0))).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0496d7e3c8bc117e658c57fc167081be_l3.png "Rendered by QuickLaTeX.com")
We can now go another step: Derive an equation for the error  , approximate
, approximate  , and obtain a new approximate solution
, and obtain a new approximate solution  . Continuing this process, we obtain an iteration
. Continuing this process, we obtain an iteration
(6) ![\[x_{i+1} = x_i + R^{-\top}(R^{-1}(A^\top(b-Ax_i))).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f8db238fc978e6a8fc968fc5e387ec27_l3.png "Rendered by QuickLaTeX.com")
 at every iteration. Later, it was realized that a single sketch suffices, albeit with a slower convergence rate. Typically, only having to sketch and QR factorize once is worth the slower convergence rate. If the distortion is small enough, this method converges at an exponential rate, yielding a high-accuracy least squares solution after a few iterations.
at every iteration. Later, it was realized that a single sketch suffices, albeit with a slower convergence rate. Typically, only having to sketch and QR factorize once is worth the slower convergence rate. If the distortion is small enough, this method converges at an exponential rate, yielding a high-accuracy least squares solution after a few iterations.
Let’s apply iterative sketching to the example we considered above. We show the forward error of the sketch-and-solve and direct methods as horizontal dashed purple and red lines. Iterative sketching begins at roughly the forward error of sketch-and-solve, with the error decreasing at an exponential rate until it reaches that of the direct method over the course of fourteen iterations. For this problem, at least, iterative sketching gives high-accuracy solutions to the least-squares problem!
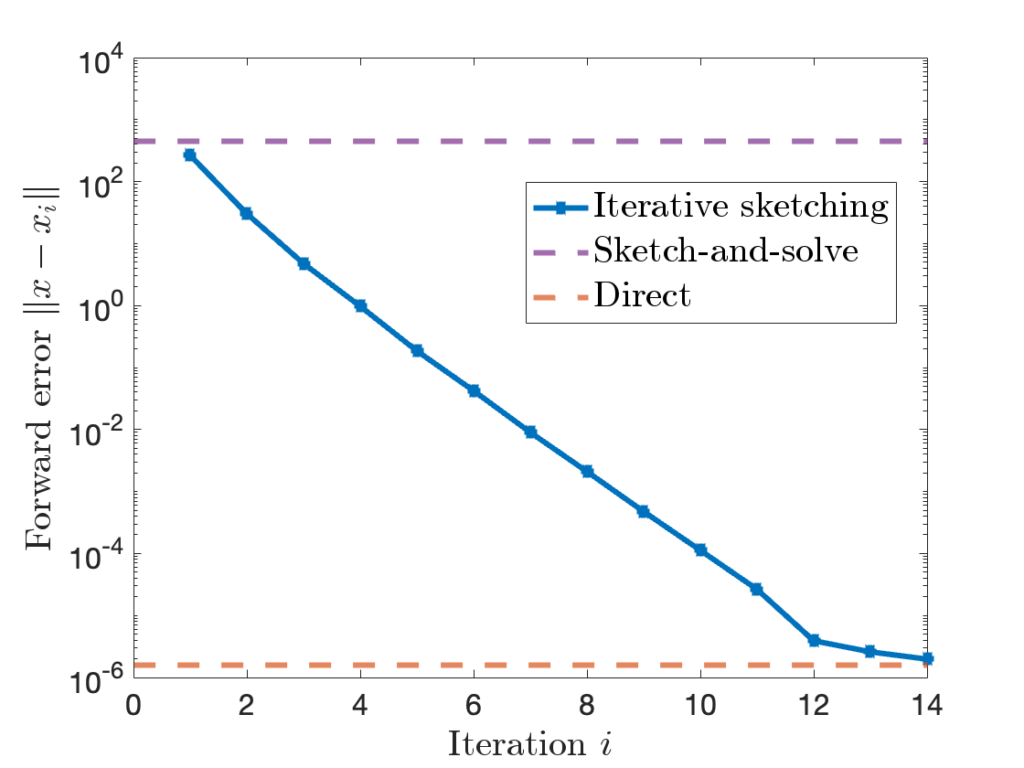
To summarize, we’ve now seen two very different ways of using sketching:
- Sketch-and-solve. Sketch the data and and solve the sketched least-squares problem (3). The resulting solution is cheap to obtain, but may have low accuracy.
- Iterative sketching. Sketch the matrix and obtain an approximation
 to . Use the approximation to produce a sequence of better-and-better least-squares solutions
to . Use the approximation to produce a sequence of better-and-better least-squares solutions  by the iteration (6). If we run for enough iterations
by the iteration (6). If we run for enough iterations  , the accuracy of the iterative sketching solution
, the accuracy of the iterative sketching solution  can be quite high.
can be quite high.
By combining sketching with more sophisticated iterative methods such as conjugate gradient and LSQR, we can get an even faster-converging least-squares algorithm, known as sketch-and-precondition. Here’s the same plot from above with sketch-and-precondition added; we see that sketch-and-precondition converges even faster than iterative sketching does!
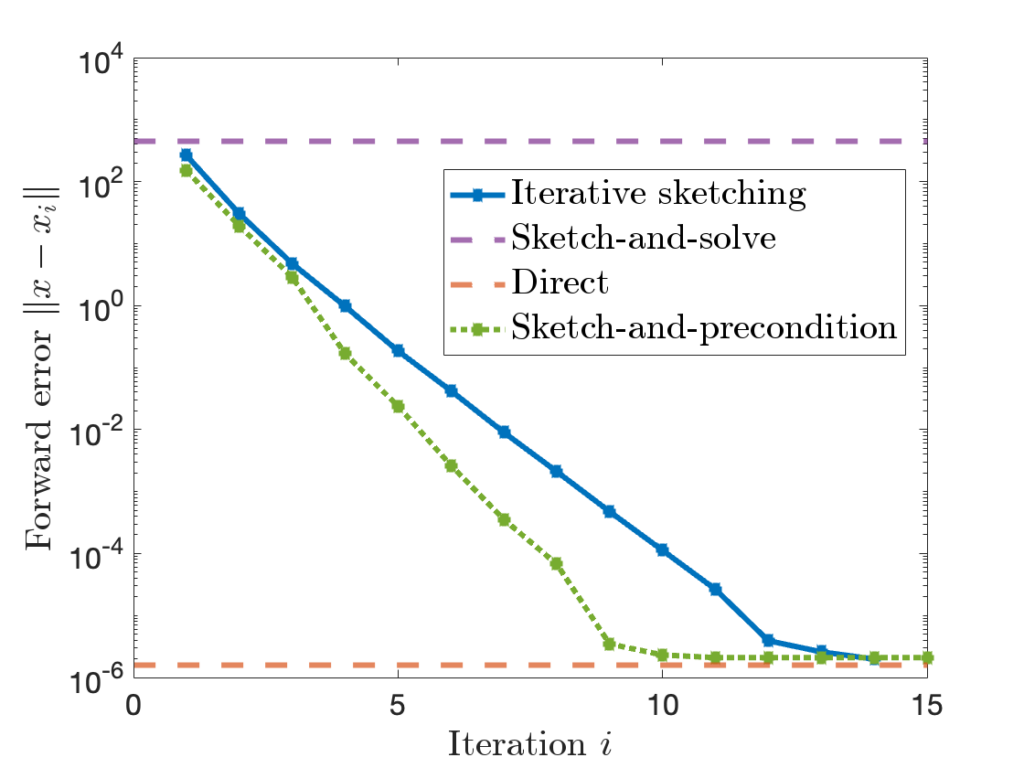
“Does sketching work?” Even for a simple problem like least-squares, the answer is complicated:
A direct use of sketching (i.e., sketch-and-solve) leads to a fast, low-accuracy solution to least-squares problems. But sketching can achieve much higher accuracy for least-squares problems by combining sketching with an iterative method (iterative sketching and sketch-and-precondition).
We’ve focused on least-squares problems in this section, but these conclusions could hold more generally. If “sketching doesn’t work” in your application, maybe it would if it was combined with an iterative method.
Just How Accurate Can Sketching Be?
We left our discussion of sketching-plus-iterative-methods in the previous section on a positive note, but there is one last lingering question that remains to be answered. We stated that iterative sketching (and sketch-and-precondition) converge at an exponential rate. But our computers store numbers to only so much precision; in practice, the accuracy of an iterative method has to saturate at some point.
An (iterative) least-squares solver is said to be forward stable if, when run for a sufficient number of iterations, the final accuracy  is comparable to accuracy of a standard direct method for the least-squares problem like MATLAB’s \ command or Python’s scipy.linalg.lstsq. Forward stability is not about speed or rate of convergence but about the maximum achievable accuracy.
is comparable to accuracy of a standard direct method for the least-squares problem like MATLAB’s \ command or Python’s scipy.linalg.lstsq. Forward stability is not about speed or rate of convergence but about the maximum achievable accuracy.
The stability of sketch-and-precondition was studied in a recent paper by Meier, Nakatsukasa, Townsend, and Webb. They demonstrated that, with the initial iterate  , sketch-and-precondition is not forward stable. The maximum achievable accuracy was worse than standard solvers by orders of magnitude! Maybe sketching doesn’t work after all?
, sketch-and-precondition is not forward stable. The maximum achievable accuracy was worse than standard solvers by orders of magnitude! Maybe sketching doesn’t work after all?
Fortunately, there is good news:
- The iterative sketching method is provably forward stable. This result is shown in my newly released paper; check it out if you’re interested!
- If we use the sketch-and-solve method as the initial iterate
 for sketch-and-precondition, then sketch-and-precondition appears to be forward stable in practice. No theoretical analysis supporting this finding is known at present.9For those interested, neither iterative sketching nor sketch-and-precondition are backward stable, which is a stronger stability guarantee than forward stability. Fortunately, forward stability is a perfectly adequate stability guarantee for many—but not all—applications.
for sketch-and-precondition, then sketch-and-precondition appears to be forward stable in practice. No theoretical analysis supporting this finding is known at present.9For those interested, neither iterative sketching nor sketch-and-precondition are backward stable, which is a stronger stability guarantee than forward stability. Fortunately, forward stability is a perfectly adequate stability guarantee for many—but not all—applications.
These conclusions are pretty nuanced. To see what’s going, it can be helpful to look at a graph:10For another randomly generated least-squares problem of the same size with condition number  and residual
and residual  .
.
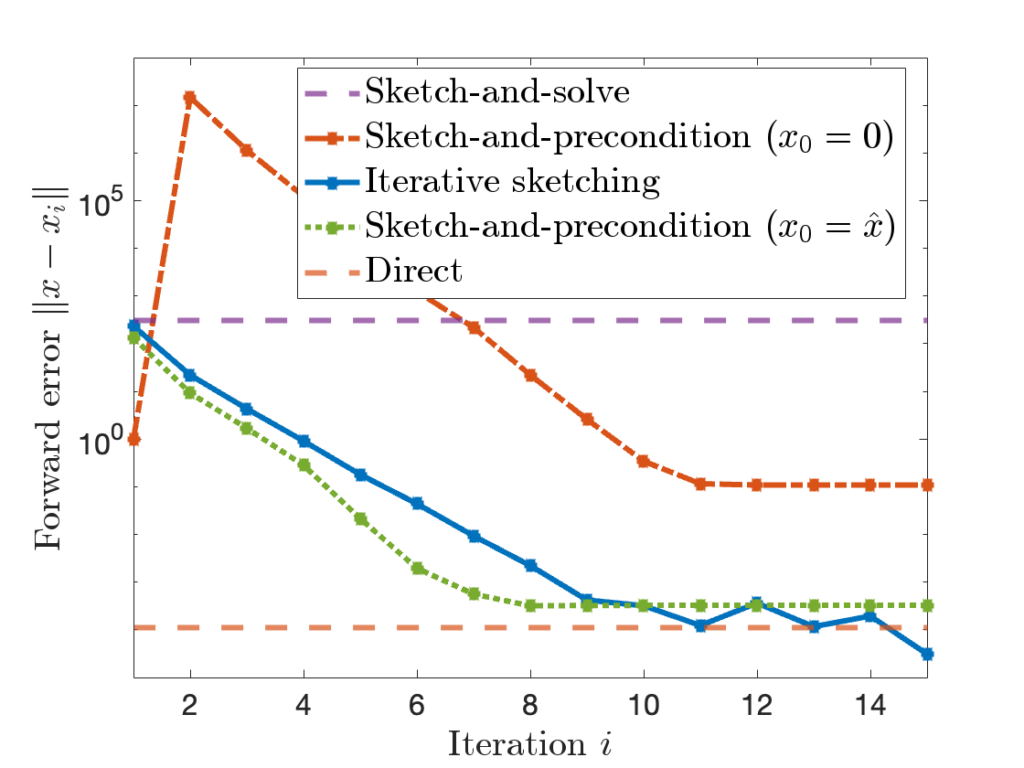
The performance of different methods can be summarized as follows: Sketch-and-solve can have very poor forward error. Sketch-and-precondition with the zero initialization is better, but still much worse than the direct method. Iterative sketching and sketch-and-precondition with fair much better, eventually achieving an accuracy comparable to the direct method.
Put more simply, appropriately implemented, sketching works after all!
Conclusion
Sketching is a computational tool, just like the fast Fourier transform or the randomized SVD. Sketching can be used effectively to solve some problems. But, like any computational tool, sketching is not a silver bullet. Sketching allows you to dimensionality-reduce matrices and vectors, but it distorts them by an appreciable amount. Whether or not this distortion is something you can live with depends on your problem (how much accuracy do you need?) and how you use the sketch (sketch-and-solve or with an iterative method).
Thank you very much for your interesting blog!
Sorry for a stupid question. Is the sketched least squares solution of min|| SAx – Sb || an unbiased estimation of the least squares solution of min || Ax – b ||, where the vector norm is l2 norm? I am thinking taking the expectation of pinv((SA)’ *SA)*(SA)’Sb, and should it be pinv(A’ A)*A’b?
What sufficient conditions should be provided here for random matrix S?
Which paper should I refer to for such claim? Thanks a lot!
Would you be able to suggest a good source / survey for data-dependent sketches? Thanks for the great article!
The most popular data-dependent sketching technique probably leverage score sampling. The best-available reference is probably David Woodruff’s monograph sketching as a tool for numerical linear algebra; see also the leverage score pages on the RandNLA wiki for some very nice expository articles. You may also want to look at more recent papers Leveraged volume sampling for linear regression, Active Regression via Linear-Sample Sparsification, and Random Fourier Features for Kernel Ridge Regression: Approximation Bounds and Statistical Guarantees and the references therein for some important ideas that came out after Woodruff’s monograph.