In the previous posts, we’ve been using eigenvalues to understand the mixing of reversible Markov chains. Our main convergence result was as follows:
![\[\chi^2\left(\rho^{(n)} \, \middle|\middle| \, \pi\right) \le \left( \max \{ \lambda_2, -\lambda_n \} \right)^{2n} \chi^2\left(\rho^{(0)} \, \middle|\middle| \, \pi\right).\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-4083a8792e3728ec282c234e8714a3e0_l3.png "Rendered by QuickLaTeX.com")
 denotes the distribution of the chain at time
denotes the distribution of the chain at time  ,
,  denotes the stationary distribution,
denotes the stationary distribution,  denotes the
denotes the  divergence, and
divergence, and  denote the decreasingly ordered eigenvalues of the Markov transition matrix
denote the decreasingly ordered eigenvalues of the Markov transition matrix  .
.
Bounding the the rate of convergence requires an upper bound on  and a lower bound on
and a lower bound on  . In this post, we will talk about techniques for bounding . For more on the smallest eigenvalue , see the previous post.
. In this post, we will talk about techniques for bounding . For more on the smallest eigenvalue , see the previous post.
Setting
Let’s begin by establishing some notation, mostly the same as previous posts as this series. We work with a reversible Markov chain with transition matrix and stationary distribution .
As in previous posts, we identify vectors  and functions
and functions  , treating them as one and the same
, treating them as one and the same  .
.
For a vector/function  ,
, ![\expect_\pi[f]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5bf080ed72a8c1f4965ae7500b95d55e_l3.png "Rendered by QuickLaTeX.com") and
and  denote the variance with respect to the stationary distribution :
denote the variance with respect to the stationary distribution :
![\[\expect_\pi[f] = \sum_{i=1}^m f(i) \pi_i, \quad \Var_\pi(f) \coloneqq \expect_\pi[(f-\expect_\pi[f])^2].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-140e8451d7640ea23691bc6e0ac79296_l3.png "Rendered by QuickLaTeX.com")
-inner product ![\[\langle f, g\rangle \coloneqq \expect_\pi[f\cdot g] = \sum_{i=1}^m f(i) g(i) \pi_i.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-429786c5a31567611cd2b34a899b00c7_l3.png "Rendered by QuickLaTeX.com")
We shall also use expressions such as
![\expect_{x \sim \sigma, y\sim \tau} [f(x,y)]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c2a42f5e811f88ddfb5da1a1164bd034_l3.png "Rendered by QuickLaTeX.com") to denote the expectation of
to denote the expectation of  where
where  is drawn from distribution
is drawn from distribution  and
and  is drawn from
is drawn from  .
.
We denote the eigenvalues of the transition matrix are . The associated eigenvectors (eigenfunctions)  are orthonormal in the -inner product
are orthonormal in the -inner product
![\[\langle \varphi_i ,\varphi_j\rangle = \begin{cases}1, & i = j, \\0, & i \ne j.\end{cases}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1bcdaefcfb18b68324fe7793e2cb3534_l3.png "Rendered by QuickLaTeX.com")
Variance and Local Variance
To discover methods for bounding , we begin by investigating a seemingly simple question:
How much variable is the output of a function
There are two natural quantities which provide answers to this question: the variance and the local variance. Poincaré inequalities—the main subject of this post—establish a relation between these two numbers. As a consequence, Poincaré inequalities will provide a bound on .
Variance
We begin with the first of our two main characters, the variance . The variance is a very familiar measure of variation, as it is defined for any random variable. It measures the average squared deviation of  from its mean, where is drawn from the stationary distribution .
from its mean, where is drawn from the stationary distribution .
Another helpful formula for the variance is the exchangeable pairs formula:
![\[\Var_\pi(f) = \frac{1}{2} \expect_{x,y \sim \pi} [(f(x) - f(y))^2].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-63885f39b045d90e13763469722ab480_l3.png "Rendered by QuickLaTeX.com")
is proportional to the average square difference of ‘s values when measured at locations and sampled (independently) from the stationary distribution .
Local Variance
The exchangeable pairs formula shows that variance is a measure of the global variability of the function: It measures the amount varies across locations and sampled randomly from the entire set of possible states  .
.
The local variance measures how much varies between points and which are separated by just one step of the Markov chain, thus providing a more local measure of variability. Let  be sampled from the stationary distribution, and let
be sampled from the stationary distribution, and let  denote one step of the Markov chain after
denote one step of the Markov chain after  . The local variance is
. The local variance is
![\[\mathcal{E}(f) = \frac{1}{2} \expect [(f(x_0) - f(x_1))^2].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a1f334058762ab02c87e271c2c92bc47_l3.png "Rendered by QuickLaTeX.com")
An important note: The variance of a function depends only on the stationary distribution . By contrast, the local variance depends on the Markov transition matrix .
Poincaré Inequalities
If does not vary much over a single step of the Markov chain, then it seems reasonable to expect that it doesn’t vary much globally. This intuition is made quantitative using Poincaré inequalities.
Definition (Poincaré inequality). A Markov chain is said to satisfy a Poincaré inequality with constant
if
(1)
![\[\Var_\pi(f)\le \alpha \cdot \mathcal{E}(f) \quad \text{for every function } f.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5e8793ac1bfab318d0a5010d48b2dbcf_l3.png "Rendered by QuickLaTeX.com")
Poincaré Inequalities and Mixing
Poincaré inequalities are intimately related with the speed of mixing for a Markov chain.
To see why, consider a function with small local variance. Because has small local variance,  is close to
is close to  , is close to
, is close to  , etc.; the function does not change much over a single step of the Markov chain. Does this mean that the (global) variance of will also be small? Not necessarily. If the Markov chain takes a long time to mix, the small local variance can accumulate to a large global variance over many steps of the Markov chain. Thus, a slowly mixing chain has a large Poincaré constant . Conversely, if the chain mixes rapidly, the Poincaré constant is small.
, etc.; the function does not change much over a single step of the Markov chain. Does this mean that the (global) variance of will also be small? Not necessarily. If the Markov chain takes a long time to mix, the small local variance can accumulate to a large global variance over many steps of the Markov chain. Thus, a slowly mixing chain has a large Poincaré constant . Conversely, if the chain mixes rapidly, the Poincaré constant is small.
This relation between mixing and Poincaré inequalities is quantified by the following theorem:
Theorem (Poincaré inequalities from eigenvalues). The Markov chain satisfies a Poincaré inequality with constant
This is the smallest possible Poincaré inequality for the Markov chain.
![\[\alpha= \frac{1}{1-\lambda_2}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-0143e8947cd9b6ad343afca4ab36be9f_l3.png "Rendered by QuickLaTeX.com")
One way to interpret this result is that the eigenvalue gives you Poincaré inequality (1). But we can flip this result around: Poincaré inequalities (1) establish bounds on the eigenvalue .
Corollary (Eigenvalue bounds from Poincaré inequalities). If the Markov chain satisfies a Poincaré inequality (1) for a certain constant
![\[\lambda_2 \le \frac{1}{1-\alpha}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-be80ee6ab2085c10ff126a991ec9ca19_l3.png "Rendered by QuickLaTeX.com")
A View to the Continuous Setting
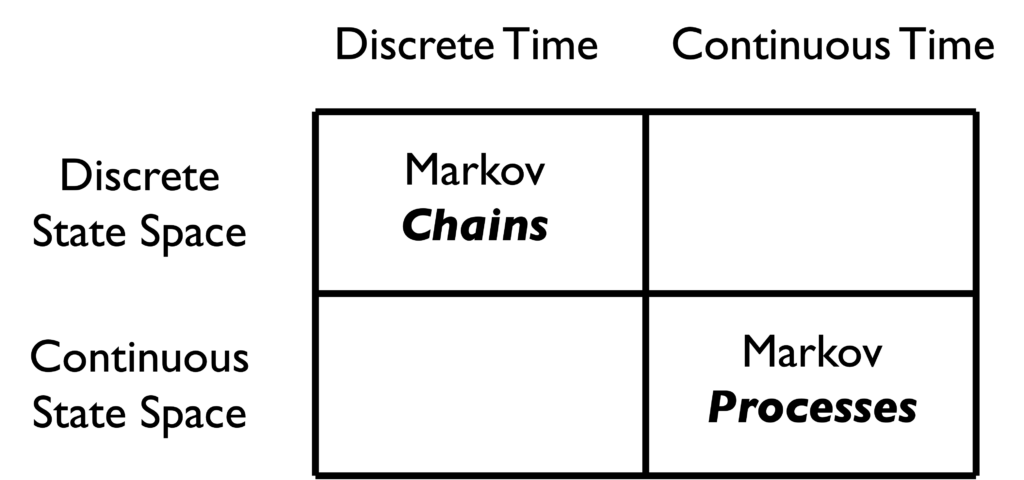
For a particularly vivid example of a Poincaré inequality, it will be helpful to take a brief detour to the world of continuous Markov processes. This series has—to this point—exclusively focused on Markov chains  that have finitely many possible states and are indexed by discrete times
that have finitely many possible states and are indexed by discrete times  .. We can generalize Markov chains by lifting both of these restrictions, considering Markov processes
.. We can generalize Markov chains by lifting both of these restrictions, considering Markov processes  which take values in continuous space (such as the real line
which take values in continuous space (such as the real line  ) and are indexed by continuous times
) and are indexed by continuous times  .
.
The mathematical details for Markov processes are a lot more complicated than for their Markov chain siblings, so we will keep it light on details.
For this example, our Markov process will be the Ornstein–Uhlenbeck process. This process has the somewhat mysterious form
![\[x_t = e^{-t}x_0 + e^{-t} B_{e^{2t}-1},\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c98a0f6993431b8ea3c5ce14e96fd6d0_l3.png "Rendered by QuickLaTeX.com")
 denotes a (standard) Brownian motion, independent of the starting state . At time
denotes a (standard) Brownian motion, independent of the starting state . At time  , the Brownian motion
, the Brownian motion  has a Gaussian distribution with variance . Thus,
has a Gaussian distribution with variance . Thus,
Conditional on its starting value
is has a Gaussian distribution with mean
and variance
.
From this observation, it appears that the stationary distribution of the Ornstein–Uhlenbeck process is the standard Gaussian distribution. Indeed, this is the case, and the Ornstein–Uhlenbeck process converges to stationarity exponentially fast.
Since we have exponential convergence to stationarity,1And, as can be checked, the Ornstein–Uhlenbeck process is reversible, in the appropriate sense. there’s a Poincaré inequality lurking in the background, known as the Gaussian Poincaré inequality. Letting  denote a standard Gaussian random variable, Gaussian Poincaré inequality states that
denote a standard Gaussian random variable, Gaussian Poincaré inequality states that
(2) ![\[\Var(f(Z)) \le \expect \big[(f'(Z))^2\big].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-2da5301cf15bd60eddb662b9859d986b_l3.png "Rendered by QuickLaTeX.com")
![\[\mathcal{E}(f) = \expect \big[(f'(Z))^2\big].\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c734423684e8cbeef463d21fd3a7d8cd_l3.png "Rendered by QuickLaTeX.com")
The Gaussian Poincaré inequality presents a very clear demonstration of what a Poincaré inequality is: The global variance of the function  is controlled by its local variability, here quantified by the expected squared derivative:
is controlled by its local variability, here quantified by the expected squared derivative:
 as a generalization of the “expected squared derivative” of the function .
as a generalization of the “expected squared derivative” of the function .
Our main interest in Poincaré inequalities in this post is instrumental, we seek to use Poincaré inequalities to understand the mixing properties of Markov chains. But the Gaussian Poincaré inequality demonstrates that Poincaré inequalities are also interesting on their own terms. The inequality (2) is a useful inequality for bounding the variance of a function of a Gaussian random variable. As an immediate example, observe that the function  has derivative bounded by
has derivative bounded by  :
:  . Thus,
. Thus,
![\[\Var(\tanh Z) \le \expect[(f'(Z))^2] \le 1.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-62932f1a7dd99680d5022f2f617204f6_l3.png "Rendered by QuickLaTeX.com")
 is –Lipschitz continuous and use the exchangeable pairs formula for variance:
is –Lipschitz continuous and use the exchangeable pairs formula for variance: ![\Var(\tanh(Z)) = 0.5\expect[(\tanh Z - \tanh Z')^2] \le 0.5 \expect[(Z-Z')^2] = \Var(Z) = 1](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-13cfee974435cfa789dc50791f5dd980_l3.png "Rendered by QuickLaTeX.com") , where
, where  is an independent copy of . but the point stands that the Gaussian Poincaré inequality—and Poincaré inequalities in general—can be useful on their own terms.3The Gaussian Poincaré inequality’s multidimensional generalization has especially interesting consequences. See the bottom of this post for an example.
is an independent copy of . but the point stands that the Gaussian Poincaré inequality—and Poincaré inequalities in general—can be useful on their own terms.3The Gaussian Poincaré inequality’s multidimensional generalization has especially interesting consequences. See the bottom of this post for an example.
Poincaré Inequalities and Eigenvalues
For the remainder of this post, we will develop the connection between Poincaré inequalities and eigenvalues, leading to a proof of our main theorem:
Theorem (Poincaré inequalities from eigenvalues). The Markov chain satisfies a Poincaré inequality with constant
That is,
(3)
There exists a function
![\[\Var_\pi(f)\le \frac{1}{1-\lambda_2}\cdot\mathcal{E}(f) \quad \text{for all } f\in\real^m.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-8b1dc6392929fce027a5637445e5e788_l3.png "Rendered by QuickLaTeX.com")
We begin by showing that it suffices to consider mean-zero functions ![\expect[f] = 0](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-ec4690eff3c2fed1a114233e551241f6_l3.png "Rendered by QuickLaTeX.com") to prove (3). Next, we derive formulas for and using the -inner product
to prove (3). Next, we derive formulas for and using the -inner product  . We conclude by expanding in eigenvectors of and deriving the Poincaré inequality (3).
. We conclude by expanding in eigenvectors of and deriving the Poincaré inequality (3).
Shift to Mean-Zero
To prove the Poincaré inequality (3), we are free to assume that has mean zero, ![\expect_\pi[f]=0](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-6fa817f7b45e4b28fb57943a37ce1887_l3.png "Rendered by QuickLaTeX.com") . Indeed, both the variance and local variance don’t change if we shift by a constant
. Indeed, both the variance and local variance don’t change if we shift by a constant  . That is, letting
. That is, letting  denote the function
denote the function
![\[\mathbb{1}(i) = 1 \quad\text{for }i =1,\ldots,m,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-76d08dac199d8cde7c208717c678cb21_l3.png "Rendered by QuickLaTeX.com")
![\[\Var_\pi(f+c\mathbb{1})=\Var_\pi(f)\quad\text{and}\quad\mathcal{E}(f+c\mathbb{1})=\mathcal{E}(f)\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-397546ace1cf7f9ee61e6b903c5d30fa_l3.png "Rendered by QuickLaTeX.com")
and constant . Therefore, for proving our Poincaré inequality, we can always shift so that it is mean-zero: ![\[\expect_\pi[f] = 0.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-768127e484e8e86a1ea3b0c57ff2254b_l3.png "Rendered by QuickLaTeX.com")
Variance
Our strategy for proving the main theorem will be to develop a more linear algebraic formula for the variance and local variance. Let’s begin with the variance.
Assume ![\expect_\pi[f] = 0](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-5bb3a81c46de080d7497a8b15dc671e4_l3.png "Rendered by QuickLaTeX.com") . Then the variance is
. Then the variance is
![\[\Var_\pi(f)=\expect[f^2]=\sum_{i=1}^m f(i)f(i)\pi_i.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-34c04d78b686f1464575345ff7942f0e_l3.png "Rendered by QuickLaTeX.com")
-inner product, we have shown that ![\[\Var_\pi(f)=\langle f,f\rangle.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-c8e6cda6b300b5ffc2d56c82e0024a40_l3.png "Rendered by QuickLaTeX.com")
Local Variance
Now we derive a formula for the local variance:
![\[\mathcal{E}(f) = \frac{1}{2} \expect[(f(x_0)-f(x_1))^2]\quad \text{where }x_0\sim\pi.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b19838fb6f36da7cbd443083ba89017c_l3.png "Rendered by QuickLaTeX.com")
 and
and  is
is  . Thus,
. Thus, ![\[\mathcal{E}(f) = \frac{1}{2} \sum_{i,j=1}^m (f(i)-f(j))^2 \pi_iP_{ij}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3b001418aee305354517a3784887e27f_l3.png "Rendered by QuickLaTeX.com")
![\[\mathcal{E}(f) = {\rm A} + {\rm B} + {\rm C}\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-a50f3c027ad34072a0bd9bd6348c40a0_l3.png "Rendered by QuickLaTeX.com")

Let’s take each of these terms one-by-one. For  , recognize that
, recognize that  . Thus,
. Thus,
![\[{\rm A} = \frac{1}{2}\sum_{i=1}^m (f(i))^2 \pi_i = \frac{1}{2}\langle f, f\rangle.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-dad7cb3fe33d90897dd8b5a31625ca44_l3.png "Rendered by QuickLaTeX.com")
 , use detailed balance
, use detailed balance  . Then, using the condition
. Then, using the condition  , we obtain
, we obtain ![\[{\rm B} = \frac{1}{2} \sum_{j=1}^m (f(j))^2 \left(\sum_{i=1}^m \pi_j P_{ji} \right) = \frac{1}{2} \sum_{j=1}^m (f(j))^2 \pi_j = \frac{1}{2} \langle f, f\rangle.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-d26f896a5e016a55ba59c4b0abca8f69_l3.png "Rendered by QuickLaTeX.com")
 , recognize that
, recognize that  is the
is the  th entry of the matrix–vector product
th entry of the matrix–vector product  . Thus,
. Thus, ![\[{\rm C} = - \sum_{i=1}^m f(i) Pf(i) \,\pi_i = -\langle f, Pf\rangle.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-37f0ed03af3cbfc11bccf5a6f6e20bb1_l3.png "Rendered by QuickLaTeX.com")
![\[\mathcal{E}(f) = \langle f, (I-P)f\rangle,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-9450ee3a751ddf403b01a7f69fe26a2e_l3.png "Rendered by QuickLaTeX.com")
 denotes the identity matrix.
denotes the identity matrix.
Conclusion
The Poincaré inequality
![\[\Var_\pi(f) \le \frac{1}{1-\lambda_2} \cdot\mathcal{E}(f) \quad \text{for all $f$ with $\expect_\pi[f] = 0$}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3d732320f8d8787a3cc4cec15b09d8d4_l3.png "Rendered by QuickLaTeX.com")
![\[\frac{\mathcal{E}(f)}{\Var_\pi(f)}\ge 1-\lambda_2 \quad \text{for all $f$ with $\expect_\pi[f] = 0$}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-f7218fec7abdef7e7270acb4dbeb6fd7_l3.png "Rendered by QuickLaTeX.com")
![\[\frac{\langle f, (I-P)f\rangle}{\langle f, f\rangle} \ge 1-\lambda_2 \quad \text{for all $f$ with $\expect_\pi[f] = 0$}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3690797d7d53191ee73aac81fbcdd36c_l3.png "Rendered by QuickLaTeX.com")
as a linear combination of eigenvectors.
Consider a decomposition of as a linear combination of ‘s eigenvectors:
![\[f = c_1 \varphi_1 + c_2 \varphi_2 + \cdots + c_m\varphi_m.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-df5f258e09e7a807979852d3373b2035_l3.png "Rendered by QuickLaTeX.com")
is equivalent to saying that  .
.
Using the orthonormality of under the -inner product and the eigenvalue relation  , we have that
, we have that

Thus,
(4) 
where
![\[a_i = \frac{c_i^2}{c_2^2 + \cdots + c_m^2}.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-3895b1bbfe12ec753d65b2a519517c7b_l3.png "Rendered by QuickLaTeX.com")
 are nonnegative and add to :
are nonnegative and add to : ![\[a_2+\cdots+a_m = \frac{c_2^2+\cdots+c_m^2}{c_2^2+\cdots+c_m^2} = 1.\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-b076fc822731dc667d48e67a60bbf6ea_l3.png "Rendered by QuickLaTeX.com")
 and
and  (equivalently, setting
(equivalently, setting  ). Thus, we conclude
). Thus, we conclude ![\[\frac{\langle f, (I-P)f\rangle}{\langle f, f\rangle}\ge 1-\lambda_2,\]](https://www.ethanepperly.com/wp-content/ql-cache/quicklatex.com-1b798877b91df792cf96ef10eb9ac632_l3.png "Rendered by QuickLaTeX.com")
is a multiple of  .
.